Читайте также:
|
Рассмотрим уравнение:
 , (2.1)
, (2.1)
В уравнении заменим производную конечной разностью:
 , (2.2)
, (2.2)
 , (2.3)
, (2.3)
 , (2.4)
, (2.4)
Подставим выражения (2.2)-(2.4) в уравнение (2.1):
 , (2.5)
, (2.5)
Приведя подобные, получим:
 , (2.6)
, (2.6)
Представим (2.6) в виде:
 , (2.7)
, (2.7)
где 


 .
.
Рассматриваемый метод идентификации, основан на регрессионных процедурах с использованием метода наименьших квадратов.
Рассматриваем систему, которая задана уравнением:

Минимизируемая функция имеет вид:
 (2.8)
(2.8)
Запишем систему уравнений для нахождения  , для этого найдем частные производные:
, для этого найдем частные производные: 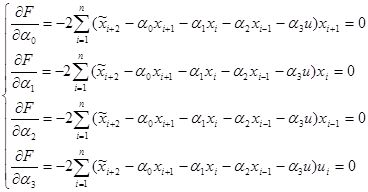 (2.9)
(2.9)
 (2.10)
(2.10)
Запишем систему в матричной форме:
 (2.11)
(2.11)
 . (2.12)
. (2.12)
По полученным  найдем коэффициенты аi
найдем коэффициенты аi
 .
.
1. Градиентные методы идентификации нелинейных систем
Для общей задачи минимизации функционала

при ограничениях

где f – нелинейная вектор - функция
Случай pi - const  будем задаваться начальным значением pi, i- номер итерации, и решив систему дифференциальных уравнений оценим величину функции штрафа Ji. Слегка изменяя pi, для нового значения
будем задаваться начальным значением pi, i- номер итерации, и решив систему дифференциальных уравнений оценим величину функции штрафа Ji. Слегка изменяя pi, для нового значения  найдем штраф
найдем штраф
Ji +hj, j = 1,n, n - число неизвестных коэффициентов
j-ю компоненту вектора-градиента функции штрафа можно приближенно оценить как
 (3)
(3)
Повторяя эту процедуру для возмущений различных компонент вектора параметров, определим приближенное значение вектора-градиента dJ/dpi Первое приращение вектора параметров в направлении наискорейшего спуска к минимуму функции штрафа составит
 (4)
(4)
и Ki – выбирается из условия
 (5)
(5)
а новое приближение для вектора параметров определится как
pi+1 = pi +Dpi.
Простота приближенного метода позволила положить его в основу нескольких итерационных схем, однако трудно оценить ошибку, связанную с приближенным вычислением dJ/dpi (процедура точного вычисления свелась бы к уже известным алгоритмам решения динамических задач). Приближенная процедура приводит к существенным ошибкам, особенно тогда, когда функция штрафа не очень чувствительна к изменению вектора параметров. Последнее, к сожалению, довольно часто имеет место, если измерения или наблюдения искажены помехой и имеются неизвестные входные сигналы.
Алгоритм вычислений следующий
1.Задаемся начальными значениями вектора параметров р.
2.Решаем дифференциальные уравнения (2)
3.Вычисляем значения функционала (1)
4.Вычисляем компоненты вектора-градиента функционала (1) по ф.(3).
5.Определяем новые значения р по ф.4 из условия (5)
6.Переходим к п.2 алгоритма, если компоненты вектора-градиента больше некоторой величины e.
2. Коэффициенты системы есть функции времени, т.е. р = p(t).
Способы аппроксимации функции p(t).
Кусочно-постоянными функциями.

Кусочно-линейными функциями.
р
 |
 t
t
Полиномиальная гипроксимация.

4.Сплайн-аппроксимация.
 где
где 
 p
p
 |
Дата добавления: 2015-10-24; просмотров: 132 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Оценивание весовой функции по методу наименьших квадратов | | | ЛІНЕАРИЗАЦІЯ МАТЕМАТИЧНОЇ МОДЕЛІ ОБ’ЄКТА |