|
Читайте также: |
В курсе теории идентификации рассматриваются модели, которые используются при анализе и синтезе различных САУ.
Все модели можно разделить на классы:
1. Модели для описания непрерывных систем
1.1. Линейные дифференциальные уравнения


1.2. Передаточные функции
 , n≥m
, n≥m
1.3. Модель в пространстве параметров состояния
 ,
,
где
U - вектор входа
x - вектор переменных состояния
y - вектор выхода системы
А - матрица динамики системы
В - матрица управления
СT - матрица измерения (датчиков)
2. Модели для описания дискретных систем
2.1 Линейные разностные уравнения
any(n-k)+an-1y(n-k-1)+a1y(n-k-N)+a0=
=bmU(m-k)+bm-1U(m-k-1)+…+b1U(m-k-M)+b0
N-порядок разностного уравнения
2.2 Дискретные передаточные функции

2.3 Модель в пространстве параметров состояния
x(k+1)=A*x(k)+B*U(k)
y(k)=Cт*x(k)
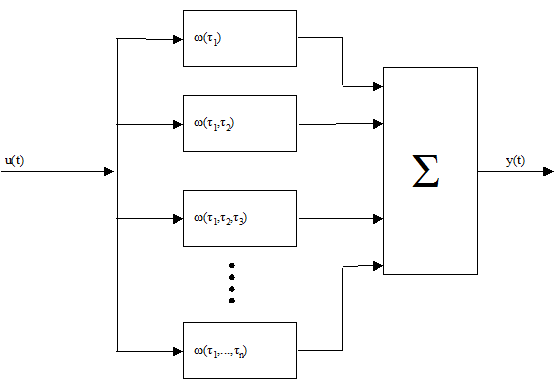
3. Модели для описания нелинейных систем
u(t)=δ(t) y(t)=ω(t)



4. Стохастические модели
Модель нелинейной системы с использованием ядер Вольтера
При рассмотрении явлений в моделях с шумами принято оценивать влияние шумов на процесс идентификации путем использования понятий авто - и взаимно - корреляционной функций. Оценку влияния шумов можно производить, если процесс описания шумов описать следующим уравнением:

Ruu-автокореляционная функция входного сигнала
Ruy-взаимнокореляционная функция входного и выходного сигнала
Если u(t) – это случайный стационарный процесс и y(t) тоже, то, применяя эти понятия не учитывают, что Ruu и Ruy позволяют оценить величину случайной составляющей, то, решая это интегральное уравнение мы можем получать оценки с учетом помех входа и выхода. Задача имеет решение при условии, что входной сигнал можно измерять “абсолютно” точно, а выходной сигнал содержит все аддитивные составляющие помехи.
Основные типы сигналов
Входные сигналы:
- ступенчатое единичное воздействие
U(t)=1(t)= 
- δ-функция:
δ(t)= 
- гармонический синусоидальный сигнал:
U(t)=a·sin(ωt+φ0)
- линейные сигналы:
U(t)=kt+b0
- случайный сигнал “Белый шум”.
-
Дата добавления: 2015-10-24; просмотров: 124 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Предмет и задачи курса. Общая постановка задач идентификации моделей | | | Характеристик объектов управления |