Читайте также:
|
Для объекта идентификации получают кривую разгона при входном воздействии в виде единичного скачка.

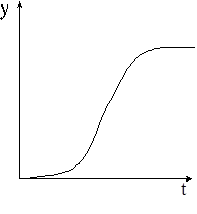
Входное воздействие Кривая разгона
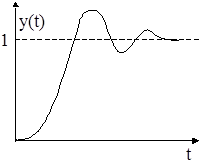
Модель объекта будем искать в виде передаточной функции:
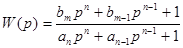 , n>m
, n>m
Надо определить аi, bi.
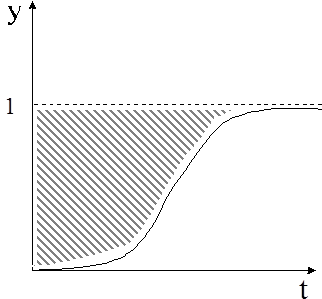
Если кривая разгона задана в реальных единицах, то для удобства обработки эту кривую разгона нормируют:
 получим кривую в диапазоне [0;1]
получим кривую в диапазоне [0;1]
Связь между коэффициентами аi, bi и параметрами кривой разгона может быть установлена через систему уравнений:
a1=F1+b1
a2=F2+b2+b1F1
a3=F3+b3+b2F1+b1F2

Параметры Fi, входящие в эту систему уравнений имеют аналитические выражения:
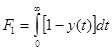

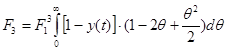
 , θ – измененный масштаб по времени
, θ – измененный масштаб по времени
Обычно 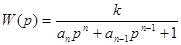
Последовательность расчета коэффициентов моделей:
1. Разбивается ось абсцисс исходной кривой разгона на отрезки времени с интервалом Δt из условия, что на протяжении графика в пределах 2Δt исходная кривая мало отличается от прямой.
2. Значения y в конце каждого интервала Δt делят на y(∞) и получают нормированное значение переходной функции.
| t | Y | 1-y | θ | 1-θ | (1-y)* (1-θ) | 
| 
|
| Δt | y(Δt) | 1-y(Δt) | Δt/F1 | ||||
| 2Δt | y(2Δt) | 1-y(2Δt) | 2Δt/F1 | ||||
|
|
|
|
| ||||
| nΔt | y(nΔt) | 1-y(nΔt) | nΔt/F1 |



Методика идентификации моделей объектов III-го порядка по их временным характеристикам
Данный метод выгодно отличается своей простотой и оперативностью. При той же точности решения вычислительные затраты на обработку кривой разгона снижаются, по сравнению с известным методом М.П. Симою. При этом круг рассматриваемых объектов значительно расширяется.
Типы моделей
Модель объекта определяется в виде дифференциального уравнения. Причем вид уравнения зависит от вида кривой разгона.
Уравнение объекта берётся в виде:
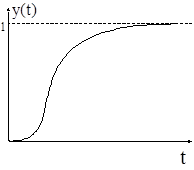
3. a3y'''+a2y''+a1y'+y=x, (1)
если кривые разгона объекта имеют вид:

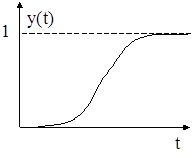
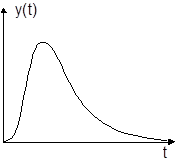
4. a3y'''+a2y''+a1y'+y=b1x'+x, (2)
если кривые разгона объекта имеют вид:


5. a3y'''+a2y''+a1y'+y=b1x', (3)
если кривая разгона объекта имеет вид:
Дата добавления: 2015-10-24; просмотров: 105 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Идентификация моделей в виде апериодических звеньев II-го порядка | | | Модель первого типа |