|
Читайте также: |
 м
м


Проверка:
1. Условие проворота выполняется потому что,  0.035< 0.140
0.035< 0.140
2. Отсутствие заклинивания  выполняется; 0.140>0.099
выполняется; 0.140>0.099
Спроектированный механизм строиться в масштабе  . Находится из отношения
. Находится из отношения  . Из точки О проводим горизонтальную прямую, разбив окружность на 12 частей.
. Из точки О проводим горизонтальную прямую, разбив окружность на 12 частей.
Рабочий цикл двухцилиндрового четырехтактного двигателя внутреннего сгорания осуществляется за 2 оборота кривошипа, исследуем механизм в 24 положениях.
Для нахождения положения ползуна взависимости от угла φ1, из каждого точки радиусом ставим засечки на горизонтали. Крайние положения точек В соответствуют ходу поршня.
Для построения индикаторной диаграммы давления производим перерасчет давления а Па расчет записан в таблицу.
| Путь поршня | SB/H | 0,025 | 0,005 | 0,1 | 0,2 | 0,3 | |
| Расширение | Pi*105Па | 6,3 | 10,5 | 8,505 | 6,51 | 4,2 | 3,045 |
| Сжатие | 6,3 | 4,83 | 4,2 | 3,15 | 1,89 | 1,155 |
| Путь поршня | SB/H | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,0 |
| Расширение | Pi*105Па | 2,205 | 1,575 | 1,26 | 0,945 | 0,672 | 0,483 | 0,336 |
| Сжатие | 0,714 | 0,399 | 0,189 | -0,115 | 0,21 | -0,294 |
3.3. Динамическая модель, её параметры
Динамическая модель представляет собой однозвенный механизм, закон движения которого совпадает с законом движения начального звена реального механизма.
Построение одномассовой динамической модели сводится к определению параметров динамической модели, которые называют приведенными параметрами механизма – моментом инерции  механизма, приведенным к оси вращения входного звена, и вращающим моментом
механизма, приведенным к оси вращения входного звена, и вращающим моментом  механизма, приведенным к оси вращения начального звена.
механизма, приведенным к оси вращения начального звена.
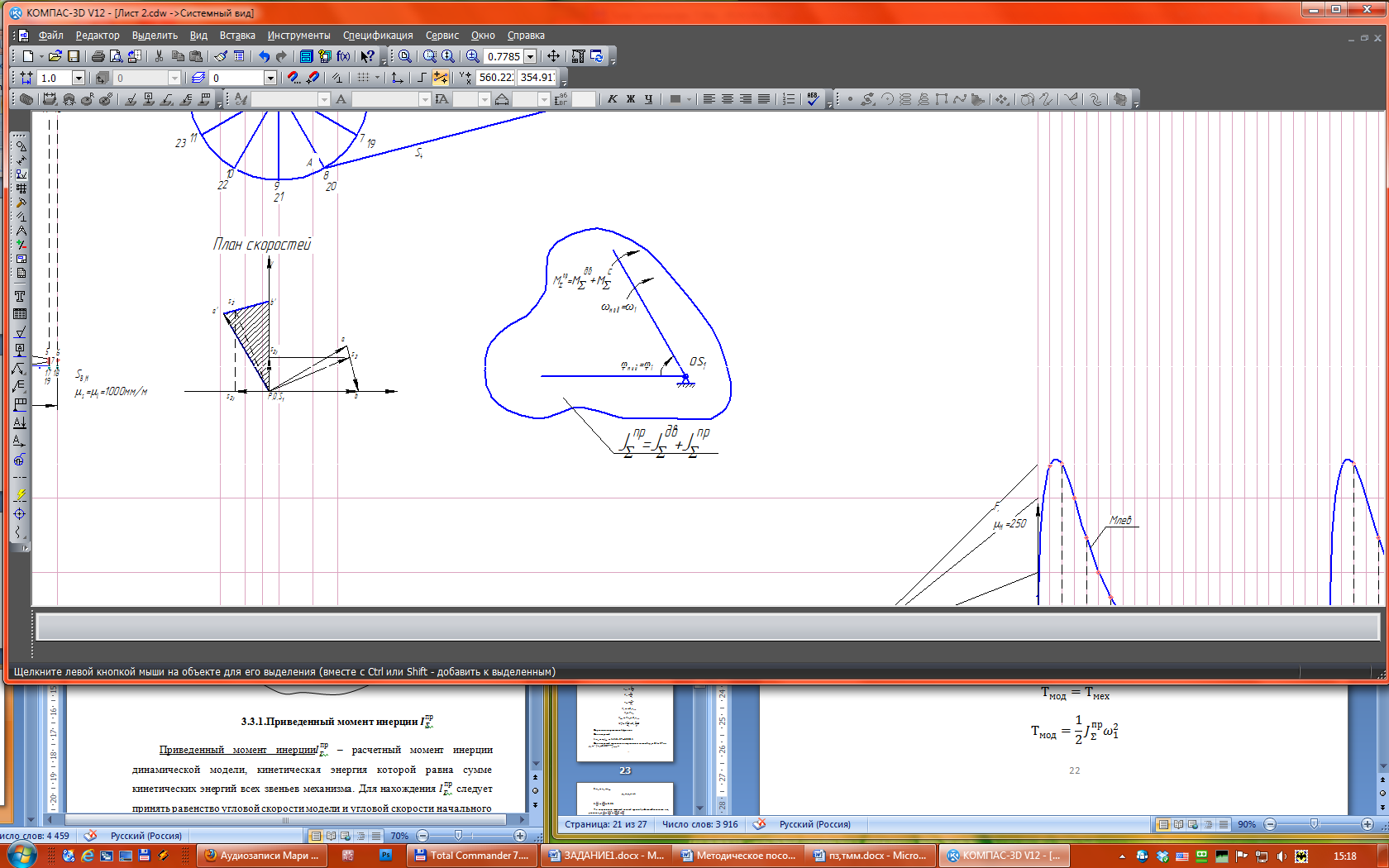
Рис. 3.3. Динамическая модель и её параметры
3.3.1. Приведенный момент инерции 
Приведенный момент инерции – расчетный момент инерции динамической модели, кинетическая энергия которой равна сумме кинетических энергий всех звеньев механизма. Для нахождения  необходимо принять равенство угловой скорости модели и угловой скорости
необходимо принять равенство угловой скорости модели и угловой скорости  начального звена реального механизма.
начального звена реального механизма.
Момент инерции: ; 

n - число цилиндров, работающих одинаково.


Первая группа звеньев- постоянная величина


Вторая группа звеньев - переменная величина
 ;
;

Передаточные функции скорости 

Передаточное отношение угловых скоростей второго звена  и первого
и первого 

передаточные функции скоростей 

3.3.2. Приведенный момент сил 
Приведенный момент сил  - расчетный момент сил динамической модели, которая развивает мощность, равную сумме мощностей всех звеньев механизма.
- расчетный момент сил динамической модели, которая развивает мощность, равную сумме мощностей всех звеньев механизма.
В основе метода приведения сил лежит равенство элементарных работ или мгновенных мощностей, с одной стороны сил и моментов, приложенных к реальному механизму ( ), а с другой – от приведенного момента, действующего на динамическую модель (
), а с другой – от приведенного момента, действующего на динамическую модель ( ).
).
Приведенный момент сил  определим из равенства:
определим из равенства:
 ;
;
 - момент сил сопротивления
- момент сил сопротивления
 ; - движущий момент
; - движущий момент
 ;
;
 ;
;




 – вес шатуна;
– вес шатуна;  – вес поршня;
– вес поршня;
Дата добавления: 2015-10-26; просмотров: 180 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Графическое определение коэффициента перекрытия | | | Определение передаточной функции |