Читайте также:
|
Объезд неподвижного препятствия. Рассмотрим методику расчета маневра. Главная цель экспертного анализа в этом случае обычно заключается в ответе на вопрос: «Имел ли водитель в данной дорожной обстановке техническую возможность избежать наезда на пешехода путем применения экстренного маневра?». Вначале рассмотрим использование маневра для объезда неподвижного препятствия.
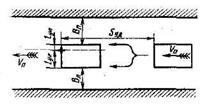
В числе исходных данных, предоставляемых эксперту, должны быть указаны ширина  препятствия (см. рис. 6.3), которое необходимо объехать, и расстояние до него в момент возможного обнаружения его водителем — расстояние конкретной видимости
препятствия (см. рис. 6.3), которое необходимо объехать, и расстояние до него в момент возможного обнаружения его водителем — расстояние конкретной видимости  . Если исследуют возможность применения маневров «вход в поворот» и «вход — выход», то нужно знать также курсовой угол, под которым автомобиль может по дорожным условиям двигаться к прежнему направлению движения по окончании маневра.
. Если исследуют возможность применения маневров «вход в поворот» и «вход — выход», то нужно знать также курсовой угол, под которым автомобиль может по дорожным условиям двигаться к прежнему направлению движения по окончании маневра.
Для успешного выполнения маневра прежде всего необходима достаточная ширина проезжей части. Динамический коридор, занимаемый движущимся автомобилем, больше его габаритной ширины вследствие поперечных колебаний кузова и «рыскания» автомобиля по курсу. Ширину динамического коридора  обычно считают линейной или степенной функцией скорости. В литературе имеются эмпирические формулы для определения :
обычно считают линейной или степенной функцией скорости. В литературе имеются эмпирические формулы для определения :

где  ,
,  —эмпирические коэффициенты; = 0,012...0,054; =0,3...0,7 м
—эмпирические коэффициенты; = 0,012...0,054; =0,3...0,7 м
Однако автомобиль при движении испытывает не только поперечные, но и угловые отклонения в горизонтальной плоскости. Поэтому на показатель влияет
не только ширина, но и длина автомобиля. Согласно исследованиям при прямолинейном движении автомобиля на равнинных дорогах  .
.
При переходе на соседнюю полосу движения водителю после экстренного маневрирования обычно не удается направить автомобиль параллельно прежнему направлению движения. В течение 2—3 с водитель выравнивает положение автомобиля, который в это время движется под углом к оси дороги. Ширина коридора возрастает. Приращение ширины в среднем может быть принято равным  . Таким образом, динамический коридор при маневре на равнинных дорогах
. Таким образом, динамический коридор при маневре на равнинных дорогах
 (6.13)
(6.13)
С каждой стороны автомобиля должен быть обеспечен безопасный интервал, исключающий контакт движущегося автомобиля с пешеходом в процессе объезда,
 (6.14)
(6.14)
Безопасный интервал при прямолинейном движении автомобиля по равнинным дорогам
 (6.15)
(6.15)
Чтобы найти условия безопасного объезда неподвижного препятствия, определим положение передних габаритных точек автомобиля — правого (П) и левого (Л) его углов (рис. 6.6): продольное перемещение правого переднего угла автомобиля в процессе маневра  ; поперечное смещение того же угла
; поперечное смещение того же угла  ; продольное перемещение переднего левого угла автомобиля
; продольное перемещение переднего левого угла автомобиля  ; поперечное смещение того же угла
; поперечное смещение того же угла 
Если угол у», в конце маневра невелик и не превышает 15° (0,216 рад), то  и
и  Тогда
Тогда  , а
, а 
Дадашев Ф. Д Динамический коридор автомобиля на равнинной и горной дорогах//Проблемы качества работы и эффективности автомобильного транспорта: Сб. науч. тр.—М.: МАДИ, 1985. (-<. 85—91,
Рис. 6.6. Координаты габаритных точек автомобиля в конце маневра
Для маневра «смена полосы движения»  = 0, следовательно,
= 0, следовательно,  и
и  .
.
Приведенные формулы действительны для левостороннего объезда, при котором возможен контакт с препятствием правой стороны автомобиля (см. рис.. 6.6). Если анализируется правосторонний объезд препятствия, то положение правого переднего угла определяют по формулам с индексом «л», а левого угла — по формулам с индексом «п».
Условие безопасного объезда препятствия путем применения маневров «вход в поворот» и «вход — выход»:
 или;
или;  . Кроме того,
. Кроме того,  или
или 
Для малых значений курсового угла и для маневра «смена полосы движения» условия безопасного объезда:
 .
.
Анализируя маневр, следует также определить наличие свободного пространства перед автомобилем в конце объезда и возможность дальнейшего движения без дополнительного маневрирования или экстренного торможения. Так, например, после окончания маневра «вход в поворот» передние колеса автомобиля повернуты на угол , и для возвращения их в нейтральное положение нужно некоторое время. В течение этого времени автомобиль будет продолжать криволинейное движение и для сохранения безопасности необходимо наличие свободного пространства впереди и по сторонам автомобиля. При смене полосы движения необходимо

Рис. 6.7. Определение возможности маневра по дорожным условиям
лишь, чтобы ширина свободной от препятствия проезжей части была достаточной для движения автомобиля параллельно прежнему направлению.
В ситуации, показанной на рис. 6.7, нужно определить расстояние от левого переднего угла автомобиля  до левой границы проезжей части в конце объезда препятствия. В соответствии с этим
до левой границы проезжей части в конце объезда препятствия. В соответствии с этим
рисунком 
Рассмотрим примерную последовательность расчета маневра типа «вход в поворот».
1. Зазор безопасности - формула (6.15);
2. Коэффициент маневра - формула (6.12);
3. Продольное перемещение автомобиля, возможное в данной дорожной обстановке

В эту формулу входит курсовой угол в конце маневра. Чтобы исключить его, воспользуемся табл. 6.2:
 (6.16)
(6.16)
следовательно,
 (6.17)
(6.17)
Если угол мал, то  .
.
4. Поперечное смещение автомобиля, максимально возможное при передвижении его на расстояние  ,
,
 (6.18)
(6.18)
5. Курсовой угол в конце маневра - формула (6.16).
6. Условие возможности выполнения маневра
 (6.19)
(6.19)
При малых значениях курсового угла  . При расчете маневра «вход — выход» последовательность сохраняется, изменяются лишь формулы для определения курсового угла и поперечного смещения (см. табл. 6.2).
. При расчете маневра «вход — выход» последовательность сохраняется, изменяются лишь формулы для определения курсового угла и поперечного смещения (см. табл. 6.2).
Для маневра «смена полосы движения» = 0 и расчеты упрощаются.
Объезд пешехода. Экспертное исследование возможности предотвращения наезда на пешехода осложнено отсутствием обоснованных данных по поведению пешехода в опасной ситуации. Когда пешеход появляется перед автомобилем, мотив самосохранения у него, видимо, не играет ведущей роли. В организованном обществе мотив самосохранения обычно подчинен какому-нибудь другому более сильному мотиву и становится главным лишь в непосредственной близости от автомобиля. Поэтому нельзя с уверенностью определить, как повел бы себя пешеход, заметив приближающийся автомобиль. Действия пешехода могут быть различными:
он может замедлить или ускорить шаг при виде автомобиля, внезапно остановиться на полосе его следования или неожиданно изменить направление своего движения. Поэтому все последующие расчеты исходят из предположения, что пешеход при объезде его автомобилем сохраняет те же, что и в процессе ДТП, темп и направление движения. На эту условность расчета следует указывать в акте экспертизы.
Определим возможность безопасного объезда пешехода, двигавшегося перпендикулярно движению автомобиля. Все расчеты проведем применительно к маневру типа «смена полосы движения» как имеющему наибольшее практическое значение.
Вначале рассмотрим, возможно ли выполнить маневр исходя из дорожной обстановки на месте ДТП.
На рис. 6.8 цифрой I отмечены положения автомобиля и пешехода в момент возникновения опасной обстановки, крестом указано положение места наезда. Цифрами II показаны положения автомобиля и пешехода в случае применения объезда спереди («с лица»). При объезде сзади («со спины») безопасный интервал  должен быть обеспечен между пешеходом и передней частью автомобиля. Для безопасного проезда перед пешеходом такой же интервал должен быть между, задней частью
должен быть обеспечен между пешеходом и передней частью автомобиля. Для безопасного проезда перед пешеходом такой же интервал должен быть между, задней частью

|
Рис. 6.8. Определение возможности объезда пешехода по дорожным условиям
автомобиля и пешеходом. За время проезда автомобиля мимо пешехода последний, продолжая движение, дополнительно прошел бы вперед путь, равный  . Если удар пешеходу был нанесен боковой частью автомобиля, то это дополнительное перемещение пешехода
. Если удар пешеходу был нанесен боковой частью автомобиля, то это дополнительное перемещение пешехода
 (6.20)
(6.20)
Если пешехода ударила передняя торцовая часть автомобиля, то
 (6.20а)
(6.20а)
Примем для простоты, что пешеход начал свое движение от края проезжей части. Тогда независимо от того, какой частью автомобиля нанесен удар, ограничение возможности выполнения маневра, накладываемое дорожными условиями:
при объезде сзади
 (6.21)
(6.21)
при объезде спереди
 (6.21а)
(6.21а)
где  - ширина проезжей части в зоне наезда.
- ширина проезжей части в зоне наезда.
Если условия (6.21) и (6.21а) не выполняются вследствие недостаточной ширины проезжей части или короткого пути, пройденного пешеходом до наезда, то вопрос о возможности объезда пешехода отпадает, поэтому проверку дорожных условий следует проводить в самом начале экспертного исследования маневра.
Если удар пешеходу нанесла передняя поверхность автомобиля, то можно рекомендовать такую последовательность расчета.
1. Минимальный безопасный интервал — формула (6.15).
2. Ширина динамического коридора  — формула (6.14).
— формула (6.14).
3. Коэффициент маневра  - формула (6.13).
- формула (6.13).
4. Условия возможности выполнения маневра с учетом дорожной обстановки: при объезде сзади и спереди — формулы (6.21) и (6.21 а).
5. Поперечное смещение автомобиля, необходимое для безопасного объезда пешехода сзади (рис. 6.9, а),
 (6.22)
(6.22)
спереди (рис. 6.9, б)
 (6.22 а)
(6.22 а)
6. Продольное перемещение автомобиля, теоретически необходимое для его смещения в поперечном направлении на  , согласно формуле
, согласно формуле
 (6.23)
(6.23)
7. Перемещение автомобиля в продольном направлении, фактически необходимое для выполнения маневра при объезде пешехода, 
8. Удаление автомобиля от места наезда на пешехода в момент возникновения опасной обстановки 
9. Условие безопасного объезда пешехода
 (6.24)
(6.24)

Рис. 6.9. Схема объезда пешехода (удар торцовой поверхностью автомобиля):
а — сзади, б — спереди

|
Рис. 6.10. Схема объезда пешехода (удар боковой поверхностью автомобиля):
а — сзади, б — спереди
Если пешехода ударила не передняя торцовая часть автомобиля, а его боковая поверхность, то общая последовательность экспертного анализа и пп. 1—3, 6, 7 и 9 останутся неизменными. Расчет по остальным пунктам будет следующим.
4. Условие возможности выполнения маневра при объезде сзади  ; при объезде спереди
; при объезде спереди 
5. Поперечное смещение автомобиля, необходимое для безопасного объезда пешехода сзади (рис. 6.10, а),  ; спереди (рис. 6.10, б)
; спереди (рис. 6.10, б)  .
.
8. Удаление автомобиля от места наезда на пешехода в момент возникновения опасной обстановки 
9. Условие безопасного объезда пешехода: 
Если наезд на пешехода произошел в процессе торможения автомобиля, то последовательность расчетов несколько меняется, так как маневр рассчитываем применительно к равномерному движению. При постоянной скорости время движения автомобиля на том же пути меньше, чем при торможении. Следовательно, и путь пешехода в предположительной версии меньше фактического его пути в процессе ДТП.
Необходимые параметры на пешехода рассчитывают в такой последовательности.
1. Скорость автомобиля перед торможением.
2. Минимально безопасный интервал.
3. Ширина динамического коридора.
4. Коэффициент маневра.
5. Условия возможности выполнения маневра с учетом дорожной обстановки.
6. Скорость автомобиля в момент наезда на пешехода.
7. Удаление автомобиля от места наезда на пешехода — формула (5.16).
8. Время движения автомобиля на пути  при постоянной скорости
при постоянной скорости  .
.
9. Путь пешехода за время  :
: 
10. Путь пешехода по полосе движения автомобиля в предположительной версии  Если в результате расчета значение
Если в результате расчета значение  окажется отрицательным, то это означает, что при
окажется отрицательным, то это означает, что при  пешеход не успел бы дойти до полосы движения автомобиля к тому моменту, когда его передняя часть достигла полосы следования пешехода.
пешеход не успел бы дойти до полосы движения автомобиля к тому моменту, когда его передняя часть достигла полосы следования пешехода.
После этого весь маневр анализируют исходя из найденного значения  .
.
|
Рис. 6.11. Схема объезда встречного и попутного пешеходов
В заключение рассмотрим возможность объезда пешехода, двигавшегося параллельно автомобилю в попутном или встречном направлении. Такие наезды наиболее характерны для темного времени суток, когда целый ряд факторов ухудшает видимость препятствия.
Буквами  и
и  на рис. 6.11 обозначены размеры свободной проезжей части слева и справа от места наезда на пешехода, а буквами
на рис. 6.11 обозначены размеры свободной проезжей части слева и справа от места наезда на пешехода, а буквами  и
и  — расстояния от места контакта до левой и правой стороны автомобиля соответственно.
— расстояния от места контакта до левой и правой стороны автомобиля соответственно.
Для безопасного объезда пешехода необходимо, чтобы хотя бы один из размеров или был не меньше динамического коридора , занимаемого автомобилем при движении. При этом автомобиль должен сместиться в поперечном направлении настолько, чтобы между ним и пешеходом был интервал не меньше, чем .
Примерная последовательность расчета при такова.
1. Безопасный интервал—формула (6.15).
2. Ширина динамического коридора — формула (6.14).
3. Условия возможности выполнения маневра при объезде слева:  ; при объезде справа:
; при объезде справа:  .
.
4. Поперечное смещение автомобиля, необходимое для объезда пешехода справа:  ; слева
; слева 
5. Продольное перемещение автомобиля, теоретически необходимое для смещения его в сторону на - формула (6.23).
6. Коэффициент маневра - формула (6.13).
7. Фактически необходимое перемещение - формула (6.12).
8. Удаление автомобиля от места наезда — формула (5.3).
9. Условие безопасного объезда пешехода:  .
.
При соблюдении данного условия можно сделать вывод о том, что водитель имел техническую возможность,
применив экстренный маневр, объехать пешехода справа (или слева), если последний не изменял направления движения.
Если пешеход был сбит в процессе торможения, то последовательность анализа и применяемые формулы не меняются, так как водитель должен был реагировать на пешехода, находясь от него на расстоянии , т. е. с момента появления пешехода в поле зрения водителя.
Наличие двух способов предотвращения ДТП (торможение и маневр) иногда вызывает вопрос: «Если в ходе ДТП водитель тормозил, что не дало положительного эффекта, в то время как маневр позволял избежать наезда (столкновения), то можно ли считать действия водителя соответствующими требованиям п. 11.1 Правил дорожного движения?».
Ответ на этот вопрос лежит в области, смежной между технической и правовой оценками действий водителя и, видимо, подлежит дальнейшей детальной разработке. В качестве предварительного соображения можно указать, что Правилами дорожного движения оба способа оцениваются как равноправные и ни одному из них не отдается предпочтения. Поэтому независимо от того, какой способ был выбран водителем в ходе ДТП (торможение или маневр), у экспертов нет основания считать его действия противоречащими Правилам дорожного движения.
С позиций водительского ремесла представляет интерес вопрос: какой из способов предотвращения ДТП (торможение, объезд спереди, объезд сзади) целесообразнее применить в конкретной дорожной обстановке?

Рис. 6.12. Условия предотвращения наезда на пешехода:
I — объезд спереди, II — объезд сзади, III — торможение
Ориентировочный ответ можно получить на основании графика, построенного по результатам исследования В. В. Иванова (рис. 6.12). Автор использовал сложную пространственную модель автомобиля и статистические оценки исхода ДТП. По оси абсцисс графика отложена скорость пешехода, а по оси ординат — расстояние продольной оси легкового автомобиля от правой границы проезжей части. Рассмотрено пять различных темпов движения пешехода в опасной ситуации (1—3,7 м/с), три скорости автомобиля (11,1—22,2м/с) и три его положения на проезжей части: на середине первой полосы движения ( ==1,87 м); на середине второй полосы ( =5,62 м); на середине дороги шириной 7,5 м ( =3,75 м).
==1,87 м); на середине второй полосы ( =5,62 м); на середине дороги шириной 7,5 м ( =3,75 м).
Как показали расчеты, независимо от типа легкового автомобиля, его скорости и состояния дорожного покрытия (сухое, мокрое) могут быть даны общие рекомендации. При следовании автомобиля близ границы опасной зоны и небольшой скорости пешехода (медленный или спокойный шаг) предпочтительнее объезд его спереди. При движении пешехода быстрым шагом и большем удалении автомобиля от обочины (тротуара, осевой линии дороги) более эффективен объезд пешехода сзади. При движении пешехода бегом примерно равноценны экстренное торможение и объезд пешехода сзади.
График построен для легкового автомобиля ГАЗ-24 «Волга», однако он может быть использован и для всех других легковых автомобилей.
Нельзя согласиться с встречающимся иногда мнением о том, что водитель «в случае крайней необходимости имеет право выехать на обочину». Для движения транспортных средств предназначена лишь проезжая часть.
Контрольные вопросы
Дата добавления: 2015-10-16; просмотров: 893 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ВИДЫ МАНЕВРОВ | | | ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ УДАРА |