Читайте также:
|
Система подвижного упора управления предназначена для автоматического изменения положения упора, ограничивающего максимальную величину угла установки лопастей рулевого винта в зависимости от плотности воздуха с целью предохранения винта и трансмиссии от перегрузок
При уменьшении плотности воздуха максимальный угол установки лопастей рулевого винта увеличивается, при увеличении плотности — уменьшается, при этом обеспечивается необходимый запас путевого управления
|
В состав системы входят:
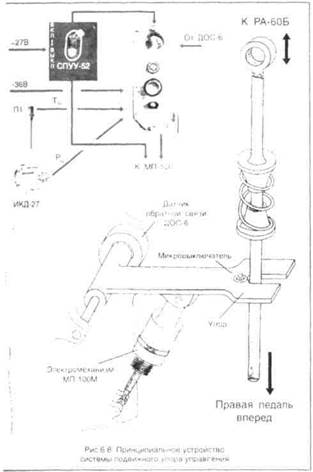
1 Механизм подвижного упора, расположенный в редук-торном отсеке на стенке контейнера расходного бака и состоящий из:
J подвижного упора с микровыключателем:
□ датчика обратной связи ДОС-6;
-] исполнительного механизма МП-100М с полным ходом штока 41...42 мм;
[_) тяги, идущей от педалей к золотнику гидроусилителя
2. Приемник температуры П-1, установленный на входе в вентиляторную установку.
3. Датчик барометрического давления воздуха ИКД-27Да установленный под полом кабины экипажа
4. Переключатель «СПУУ-52» принудительной уборки упора, расположенный на левом боковом пульте

|
5 Блок управления БУ-32. на передней панели которого расположены
- нулевой индикатор, показывающий положение подвижного упора (смещение подвижного индекса влево соответствует увеличению запаса хода правой педали);
- красная кнопка-табло «ОТКЛ», сигнализирующая об отключении системы и служащая для ее проверки;
- ручка центрирования, служащая для проверки исправности электроцепей блока управления;
- нажимной переключатель имитации сигналов по температуре и давлению для проверки системы.
Б. Работа системы
Система работает при наличии постоянного 27В и переменного 36В тока и включенном переключателе «СПУУ-52» Блок управления в этом случае подключается к сети постоянного тока, а переменный ток подается на блок управления независимо от положения переключателя «СПУУ-52»
При изменении плотности воздуха сигналы от датчиков температуры и давления поступают в блок управления Сюда же поступает сигнал с датчика обратной связи В блоке управления все сигналы суммируются, и, если положение подвижного упора не соответствует плотности воздуха, формируется сигнал рассогласования, который в виде напряжения подается на электромеханизм МП-100. Этот механизм устанавливает упор в положение, соответствующее данным условиям. На высотах, близких к уровню моря, при средних и низких температурах наружного воздуха стрелка нулевого индикатора перемещается вправо При малых значениях плотности стрелка может находиться в крайнем левом или близком к нему положении.
При работе системы от автопилота в режиме «ПЕРЕГОНКА» (движение правой педали вперед) срабатывает микровыключатель на подвижном упоре и отключает канал «НАПРАВЛЕНИЕ» автопилота Движение педалей прекращается.
Если на педали воздействовал летчик (канал «НАПРАВЛЕНИЕ» отключен), то при дальнейшем движении тяги упор останавливается, обеспечив дополнительный ход штока микровыключателя 1.8..2 мм после срабатывания; при этом тяга проходит путь около 1 мм. Дальнейшее движение тяги, еще примерно на 5 мм, приводит к сжатию пружины на тяге. В момент соприкосновения торцов втулок возможность движения тяги исчезает, и тяга становится на жесткий упор.
В зависимости от плотности наружного воздуха максимально возможный угол отклонения лопастей рулевого винта может изменяться в пределах от 16°00'.. 16°45' до
20°30'. 20°50' при ручном управлении, и при управлении от автопилота - в пределах от 13°20' до 17°20\
Примечание На вертолетах типа МИ-8МТВ угол установки лопастей рулевого винта при полностью выдвинутом штоке составляет 16°55' 17°45', а максимально возможный угол установки — 22°40' 23°20'
При установке переключателя «СПУУ-52» в положение «ОТКЛ» напряжение 27В снимается с блока управления (загорается красная кнопка-табло «ОТКЛ») и подается непосредственно на электромеханизм МП-100. устанавливающий подвижный упор на максимальный угол установки лопастей Переменное напряжение в этом случае с блока управления не снимается, и нулевой индикатор показывает положение упора
Дата добавления: 2015-08-02; просмотров: 349 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Б. Устройство автомата перекоса | | | Г. Возможные отказы системы и действия экипажа |