Читайте также:
|
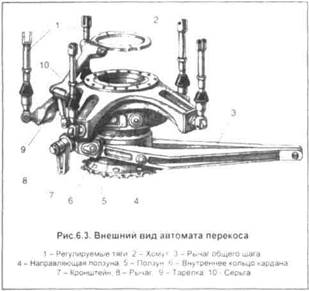
Автомат перекоса представляет собой механизм, позволяющий изменять углы установки лопастей
Изменение общего шага несущего винта, то есть увеличение или уменьшение углов установки всех пяти лопастей на одну и ту же величину приводит к изменению полной аэродинамической силы по величине (к изменению режима полета вертолета)
Путем соответствующего изменения наклона плоскости вращения тарелки автомата перекоса происходит циклическое изменение углов установки каждой лопасти, в результате чего изменяется направление полной аэродинамической силы несущего винта и обеспечивается продольная и поперечная управляемость вертолета.
В состав автомата перекоса входят
J Направляющая ползуна;
□ Ползун;
□ Кронштейн
3 Универсальный шарнир (кардан) с наружным и внутренним кольцами;
Д Тарелка;
□ Тяги поворота лопастей;
□ Рычаг с серьгой и хомутом;
3 Рычаг общего шага
Направляющая ползуна представляет собой стальной цилиндр с фланцем для крепления к главному редуктору.
Ползун выполнен в виде стального цилиндра с приклепанными изнутри бронзовыми втулками, которые скользят по направляющей.
В центральной части ползуна имеется фланец, к которому крепится кронштейн ползуна.
В верхней части ползуна расточены два отверстия, в которых на подшипниках установлены пальцы, соединяющие ползун с внутренним кольцом кардана. Общая ось пальцев, соединяющих внутреннее кольцо с ползуном, расположена
перпендикулярно общей оси пальцев, соединяющих внутреннее кольцо кардана с наружным.
При таком соединении наружное кольцо и тарелка, смонтированная на нем, могут наклоняться во всех направлениях относительно ползуна.
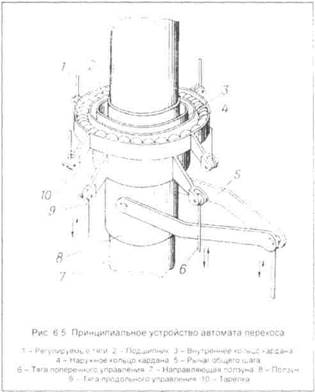
В наружном кольце под углом 90° друг к другу консольно закреплены два пальца, которые соединены с тягами продольного и поперечного управления
На цилиндрической поверхности в верхней части наружного кольца кардана на радиально-упорном двухрядном подшипнике установлена тарелка автомата перекоса. Тарелка изготовлена в форме пятиконечной звезды с массивным центральным кольцом В лучах звезды (в лапах тарелки), расположенных под углом 72° друг к другу, запрессованы стальные стаканы для монтажа концевых шарниров тарелки
Тарелку приводит во вращение поводок, представляющий собой кинематическое звено, состоящее из хомута, серьги и рычага, шарнирно связанных между собой. Поводок обеспечивает синхронное вращение тарелки и втулки несущего винта при любых наклонах тарелки автомата перекоса и поступательном ее перемещении вдоль оси направляющей Хомут поводка смонтирован на корпусе втулки несущего винта и зафиксирован в определенном угловом положении штифтом.
Наклон тарелки автомата перекоса производится с помощью качалок продольного и поперечного управления, смонтированных в бобышках кронштейна, закрепленного на фланце ползуна, со смещением на 21° против вращения несущего винта для обеспечения независимости продольного и поперечного управления.
В. Ограничитель смещения хомута автомата перекоса
Ограничитель смещения хомута автомата перекоса предотвращает сход деформированного хомута с посадочного места втулки несущего винта, а также сигнализирует о появлении деформации кронштейна хомута.
Ограничитель состоит их двух полуколец, стягиваемых болтами.
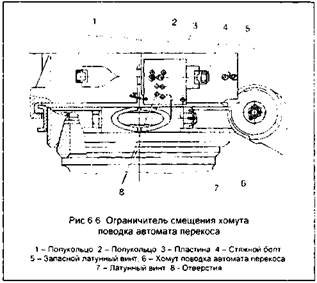
На полукольце имеется прилив, который охватывает при установке ребро хомута поводка автомата перекоса
На двух диаметрально противоположных плоских поверхностях полукольца с помощью двух латунных винтов крепятся пластины, которые закрывают окрашенные в красный (оранжевый) цвет участки
При деформации кронштейна хомута деформированная часть кронштейна смещается вверх и нажимает на ребро пластины При этом латунные винты срезаются, и пластина падает вниз, зависнув на контровочной проволоке. Обнажившийся участок, окрашенный в красный (оранжевый) цвет сигнализирует о наличии деформации кронштейна поводка

|
6.4 ПУТЕВОЕ УПРАВЛЕНИЕ
В состав путевого управления входят
J педали летчика и летчика-штурмана параллелограмм-ного типа, на опорных площадках которых смонтированы гашетки для отключения канала «НАПРАВЛЕНИЕ» автопилота;
□ проводка управления, включающая в себя
- систему тяг и качалок;
- участок тросовой проводки с втулочно-роликовой
цепью.
i_l гидроусилитель РА-60Б;
J механизм загрузки с электромагнитным тормозом ЭМТ-2М;
[J агрегат управления
U механизм изменения шага рулевого винта;
□ система подвижного упора управления СПУУ-52-1.
6.5. СИСТЕМА ПОДВИЖНОГО УПОРА УПРАВЛЕНИЯ СПУУ-52-1
Дата добавления: 2015-08-02; просмотров: 667 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| УПРАВЛЕНИЕ ВЕРТОЛЕТОМ | | | А. Назначение и состав системы |