Читайте также:
|
Основная система метода перемещений должна быть кинематически определимой. Чтобы выполнить это требование узлы рамы закрепляют от поворотов и линейных смещений введением дополнительных связей.
Основную систему получают из заданной (см. рисунок 4.1):
1) введением дополнительных (фиктивных) связей, устраняющих угловые и линейные перемещения узлов (рисунок 4.6, а);
2) заданием введенным связям соответствующих угловых и линейных перемещений  (рисунок 4.6, б).
(рисунок 4.6, б).
П р и м е ч а н и е – Общее число введенных в основную систему связей равно, естественно, числу неизвестных метода перемещений.
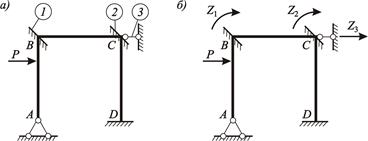
Рисунок 4.6 – К выбору основной системы метода перемещений:
а – рама с введенными дополнительными связями; б – основная система
В качестве дополнительных вводятся следующие связи:
угловая связь («плавающая заделка») – вводится во все жесткие узлы для устранения их поворотов (угловых перемещений);
линейная связь – вводится в необходимые места заданной системы для устранения линейных перемещений узлов (об этом информирует шарнирная система).
В рассматриваемом случае две угловые связи («плавающие заделки») с номерами 1 и 2 вводятся для устранения поворота жестких узлов В и С, линейная связь (номер 3) – для устранения линейных перемещений этих же узлов.
П р и м е ч а н и е – Заделка называется «плавающей», поскольку такая связь оказывает препятствие лишь повороту узла, но не лишает его линейной подвижности.
Кинематическая эквивалентность основной и заданной систем достигается тем, что связям одновременно с их введением задают соответствующие угловые и линейные перемещения .
На рисунке 4.6 через  ,
,  и
и  обозначены заданные перемещения введенных связей (показаны стрелками на основной системе).
обозначены заданные перемещения введенных связей (показаны стрелками на основной системе).
П р и м е ч а н и е:
1 Заданные перемещения  введенных связей имеют такой же индекс, как и номер фиктивной связи. В рассматриваемом случае
введенных связей имеют такой же индекс, как и номер фиктивной связи. В рассматриваемом случае  ,
,  – угловые перемещения узлов В и С, устраняемые заделками 1 и 2;
– угловые перемещения узлов В и С, устраняемые заделками 1 и 2;  – линейное перемещение узлов В и С, устраняемое стержнем 3.
– линейное перемещение узлов В и С, устраняемое стержнем 3.
2 Углы поворота введенных связей (в нашем случае и ) условно задаются по часовой стрелке, линейные перемещения (в нашем случае ) – слева – направо.
|
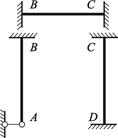
| Рисунок 4.7 – Представление основной системы совокупностью статически неопределимых балок |
Таким образом, расчету подлежит не заданная система, а преобразованная (основная) система, которая должна быть эквивалентна ей в статическом и кинематическом отношениях.
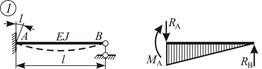
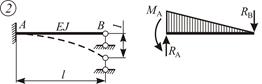
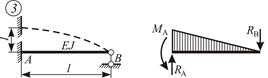
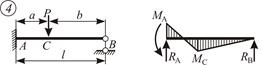
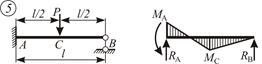
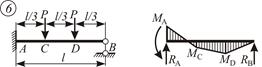
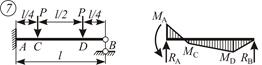
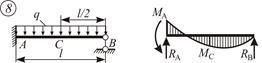
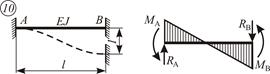
Введенные связи расчленяют получаемую основную систему на отдельные простейшие статически неопределимые балки – конечные элементы (рисунок 4.7). Каждая из этих балок хорошо изучена и результаты их расчета на стандартные воздействия приводятся в справочных данных (таблица 4.1).
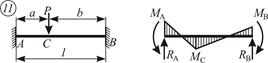
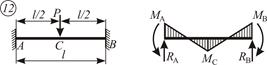
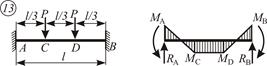
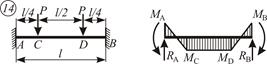
Таблица 4.1 – Результаты расчета эпюр изгибающих моментов однопролетных статически неопределимых балок
| Схема балки и воздействия на нее | Эпюры изгибающих моментов и реакции | Формулы |
|  ; ; 
| |
|  ; ;

| |
| ||
|  ; ;  ; ;
 ; ; 
| |
|  ; ;  ; ;
 ; ; 
| |
|  ; ;  ; ;
 ; ;  ; ; 
|
 Продолжение таблицы 4.1
Продолжение таблицы 4.1
| Схема балки и воздействия на нее | Эпюры изгибающих моментов и реакции | Формулы |
|  ; ;  ; ;
 ; ;  ; ; 
| |
|  ; ;  ; ;
 ; ; 
| |

|  ; ;
 ; ; 
| |
|  ; ;

| |
|  ; ;  ; ;
 ; ;  ; ; 
| |
|  ; ;
|
Окончание таблицы 4.1
 Схема балки и воздействия на нее Схема балки и воздействия на нее
| Эпюры изгибающих моментов и реакции | Формулы |
|  ; ;
 ; ; 
| |
| ;
 ; ; 
| |
|
|  ; ;
 ; ; 
|
П р и м е ч а н и я
1 Таким образом, основная система метода перемещений представляет собой совокупность независимых элементов – однопролетных статически неопределимых балок, изображенных на рисунке 4.7. В рассматриваемом случае балки ВС и СD – балки с защемлениями по концам, АВ – балка с защемлением и шаровой опорой.
2 В отличие от метода сил, основная система метода перемещений является единственной
Дата добавления: 2015-07-10; просмотров: 248 | Нарушение авторских прав