Читайте также:
|
| в} |
Рис 7 14 Повреждения поверхности автомобиля при столкновениях- а — царапины при отслоении грунтов ки, б — заусенцы на задире
условно считаем неподвижным). Если определять угол ^ст описанными выше методами (рис. 7.13, б), можно прийти к неверному выводу о том, что автомобили в начальный момент удара были расположены под углом около 35°.
Иногда угол ^ст определяют по фотографиям поврежденных транспортных средств. Этот способ дает хорошие результаты только в том случае, когда снимки разных сторон автомобиля сделаны под прямым углом с одного и того же расстояния.
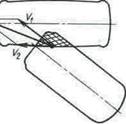
Представление о соотношении скоростей соударяю-щихся автомобилей и направлении их движения можно получить, исследовав повреждения окрашенных поверхностей и металлических деталей. Следы на поверхности поврежденного автомобиля, ширина которых больше, чем глубина, а длина больше, чем ширина, называют царапинами. Царапины идут параллельно поврежденной поверхности. Они имеют небольшие глубину и ширину вначале, расширяясь и углубляясь к концу. Если вместе с лакокрасочным покрытием повреждается грунтовка, то она отслаивается в виде широких каплеобразных царапин длиной 2—4 мм. Широкий конец капли направлен в сторону движения предмета, нанесшего царапину. В конце капли грунтовка может отслоиться, образовав поперечные трещины длиной около 1 мм (рис. 7.14, а). Повреждения, глубина которых больше их ширины, называют задирами и вмятинами. Глубина задира обычно увеличивается от его начала к концу, что позволяет определить направление движения царапавшего предмета. На поверхности задира часто остаются острые заусенцы (рис. 7.14, б), которые отогнуты в том же направлении, в котором двигался царапавший предмет.
Зная направление движения предмета, нанесшего царапину или задир (на рис. 7.14 показано стрелкой), эксперт определяет, какой из автомобилей при попутном скользящем ударе двигался с большей скоростью. У автомобиля, двигавшегося медленнее, следы царапин направлены от задней части к передней, а у обгонявшего автомобиля — в противоположную сторону.
Важную информацию о механизме ДТП может дать изучение положения автомобилей после удара. При встречном прямом столкновении скорости автомобилей взаимно погашаются. Если их масса и скорость были примерно одинаковы, то они останавливаются вблизи места столкновения. Если же массы и скорости были различными, то автомобиль, двигавшийся с меньшей скоростью, или более легкий отбрасывается назад. Иногда водитель грузового автомобиля перед столкновением не снимает ногу с педали управления дроссельной заслонкой и, растерявшись, продолжает нажимать на нее. В этом случае грузовой автомобиль может протащить волоком встречный легковой автомобиль на довольно большое расстояние от места столкновения.
Скользящие столкновения сопровождаются небольшой потерей кинетической энергии при сравнительно значительных разрушениях и деформациях кузова. Если водители перед столкновением не тормозили, то они могут далеко разъехаться от места столкновения.
В момент удара автомобилей скорости у\ и и^ контактирующих деталей складываются и соударяющиеся участки некоторое время движутся в направлении результирующей скорости из (рис. 7.15). В этом же направлении движутся и центры тяжести автомобилей. Хотя после прекращения действия ударных нагрузок автомобили движутся под влиянием внешних сил и в дальнейшем траектории обоих автомобилей могут измениться, однако общее направление движения центров тяжести позволяет определить положение автомобилей в момент столкновения.
Определение скорости автомобиля перед ударом. Определить начальную скорость автомобиля на основании данных, содержащихся в материалах уголовного дела, обычно довольно трудно, а иногда и невозможно. Причинами этого является отсутствие универсальной методики расчета, пригодной для всех вариантов столкновений, и недостаток исходных данных. Попытки использовать коэффициент восстанов- р^,,5. Направление движения ления в этих случаях ••"
|
| н(э автомобиля после удара |
приводят к положительным результатам, так как достоверных значений этого коэффициента при столкновении не опубликовано. При исследовании столкновений транспортных средств нельзя применять экспериментальное значение Кул, действительное для наезда автомобиля на жесткое препятствие. Процессы деформирования деталей в обоих случаях принципиально различны, соответственно различными должны быть и коэффициенты восстановления, о нем свидетельствует, например, рис. 7.6. Возможность накопить достаточную экспериментальную информацию, учитывая многообразие моделей автомобилей, их скоростей и видов столкновений, исче-зающе мала. В Японии исследователями Такеда, Сато и другими предложена эмпирическая формула для коэффициента восстановления
| а) |
| V, | У^О | |||
| т, | тг | 1 | 2 | |
| ^пн у |
| ? | 3^ | |||||
| -?"' 1- | ^ля,, | |||||
| )»»-»- |
| ? | И? | |||||
| 5, | 0/7// | |||||
| //Г ^1 | пнг ~) | |||||
| -4и | ||||
| ию1» | <? |
| Рис. 7 16 Схемы наездаавтомобиля на стоящий автомобиль-а — оба автомобиля не заторможены, б — оба автомобиля заторможены; в — заторможен передний автомобиль, г — заторможен задний автомобиль |
/С„=0,574е-°'0396^, где и'а — скорость автомобиля, км/ч.
Однако экспериментальные точки на графике, послужившем основой для этой формулы, расположены с большим разбросом относительно аппроксимирующей кривой, и расчетные значения Луд могут отличаться от действительных в несколько раз. Поэтому формулу можно рекомендовать лишь для сугубо ориентировочных подсчетов, а не для применения в экспертной практике тем более, что она описывает ДТП с иностранными автомобилями.
Отсутствие надежной информации о коэффициенте восстановления часто вынуждает экспертов рассматривать предельный случай, считая удар абсолютно неупругим (/<уд=0).
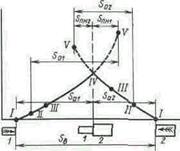
Определить параметры прямого столкновения (см. рис. 7.11, / и ///) можно лишь в том случае, если один из автомобилей до удара был неподвижным, и скорость его Г2=0. После удара оба автомобиля перемещаются как одно целое со скоростью v'} (рис. 7.16).
При этом возможны различные варианты.
I. Не заторможены оба автомобиля, и после удара они катятся свободно (рис. 7.16, а) с начальной скоростью у'\.
Уравнение кинетической энергии при этом
(т, +тг) (У'^/2=(гщ +отг) ^д,=5„н,
где 5цн — перемещение автомобилей после удара; фд, — коэффициент суммарного сопротивления движению, определяемый по формуле (3.7а)._____
Следовательно, и^==^/2^дв5цн. Кроме того, согласно формуле (7.2) при иа=0 и и\=и'2 скорость автомобиля / перед ударом
(7.15)
II. Оба автомобиля заторможены, после удара перемещаются совместно на расстояние 5цн (рис. 7.16, б) с начальной скоростью v'}. _____
Скорость автомобилей после удара и1==-\/2^(р^5цн.
Скорость автомобиля / в момент удара — формула (7.15).
Скорость автомобиля / в начале тормозного пути
(7.16)
где 5ю| — длина следа юза автомобиля / перед ударом.
Скорость автомобиля / перед началом торможения
(7.17)
III. Заторможен стоящий автомобиль 2, автомобиль / не заторможен (рис. 7.16, в).
Оба автомобиля после удара перемещаются на одно и то же расстояние 5пн с начальной скоростью у'\. Уравнение кинетической энергии в этом случае: (1п\-\-тч)Х. X (и1)^2 == (т | ^дв + т^ёЗп», откуда
v'! == л/2^(от | (рАн + т2^дв5„н)/(от | + тг).
IV. Стоящий автомобиль 2 не заторможен. Задний автомобиль / перед ударом в заторможенном состоянии переместился на расстояние 5ю1. После удара перемещение автомобиля / равно 5пн1, а перемещение автомобиля 2 — 5„н2.
Аналогично предыдущим случаям
у\ =-\/2^ (От|(рх5пн1 + т^ю5т'г)/(1П1 + тч).
Скорости у), Уа1 и Уа определяют соответственно по формулам (7.15)—(7.17).
Применить эту методику для анализа встречного или попутного столкновения, при котором двигались оба автомобиля, возможно только, если следствием или судом установлена скорость одного из автомобилей.
При перекрестном столкновении (рис. 7.17, а) оба автомобиля обычно совершают сложное движение, так как в результате каждый из автомобилей начинает вращаться около своего центра тяжести. Центр тяжести в свою очередь перемещается под некоторым углом к первоначальному направлению движения. Пусть водители автомобилей / и 2 перед столкновением тормозили, и на схеме зафиксированы тормозные следы 5) и 5а. После столкновения центр тяжести автомобиля / переместился на

Рис. 7.17. Схемы столкновения автомобилей-а — перекрестного; б — косого
расстояние 8\ под углом Ф\, а центр тяжести автомобиля 2 — на расстояние 8\ под углом Фа.
Все количество движения системы можно разложить на две составляющие в соответствии с первоначальным направлением движения автомобилей / и 2. Поскольку количество движения в каждом из указанных направлений не изменится, то:
/П|У1=ОТ1У1С05Ф|+ОТ2У2С05Ф2; (7.18)
тгУ'г= т\у'\&т Ф^+т^игбт Фг, (7.19) где и'\ и иг — скорости автомобилей / и 2 после удара.
Эти скорости можно найти, предположив, что кинетическая энергия каждого автомобиля после удара перешла в работу трения шин по дороге во время поступательного перемещения на расстояние 8пн\ (Зпнг) и поворота вокруг центра тяжести на угол 61 (ег).
Работа трения шин на дороге при поступательном движении автомобиля /
Л'=т1§8т\({>у.
То же при повороте его относительно центра тяжести на угол б1:
Л"=/?г|а]е1(ру+/?г2б|е1ф„,
где а.1 и Ь\ — расстояния от переднего и заднего мостов автомобиля / до его центра тяжести; Кг\ и Кг2— нормальные реакции дороги, действующие на передний и задний мосты автомобиля./; б) —угол поворота автомобиля /, рад.
При этом
к^^т^ь^/и; Кггяип^щ/и,
где и — база автомобиля /.
Следовательно,
А' + А" = /П|^(5^1(ру + 20,6,61^/^) = =т,(у\У/2.
Отсюда скорость автомобиля / после столкновения
(7.20) 205
Точно так же находим скорость автомобиля 2 после столкновения
| (7.21) |
и а = ^2§<Р» (5„н2 + 2026262/^-"),
где ^/' и 82 — соответственно база и угол поворота автомобиля 2; (22 и &2 — расстояния от переднего и заднего мостов автомобиля 2 до его центра тяжести.
Подставив эти значения в формулу (7.18), определим скорость автомобиля /
у! ==[У2^фу(от|С05Фп|/.5„н1+2а|Ь1в1Д/-т-+ /пасов Ф2-\/5пн2 + ЧачЬ^ч/Ь")\/т \.
Аналогично для автомобиля 2
^2 == Ь/Щг^т 1 5шФп/5,„,1+2а|&1е1/1/ + + т^зт Ф2-У5|,в24-2а2б2е2///')]//Я2.
Зная скорости у\ и ог автомобилей непосредственно перед столкновением, можно, используя выражения (7.16) и (7.17), найти скорости в начале тормозного пути и перед торможением.
При расчетах следует иметь в виду, что расстояния (5пн1 и 5пн2) и углы (Ф) и Ф2) характеризуют перемещения центров тяжести автомобилей. Расстояния 5пн1 и 5пн2 могут значительно отличаться от длины следов шин на покрытии. Углы Ф| и Ф2 также могут отличаться от углов наклона следов, оставленных шинами. Поэтому как расстояния, так и углы лучше всего определять по схеме, выполненной в масштабе с разметкой положения центра тяжести каждого автомобиля, участвовавшего в ДТП.
В практике нередки происшествия, в процессе которых автомобили сталкиваются под углом Хст, отличающимся от прямого. Последовательность расчета таких столкновений не отличается от изложенной выше. Только количество движения системы нужно спроектировать на составляющие, соответствующие первоначальным направлениям движения автомобилей / и 2, что повлечет за собой усложнение формул (7.18) и (7.19).
Тогда, согласно рис. 7.17, б:
ОТ1У|+'"2У2С05?1сг=ОТ1^С05Ф|+ОТ2и2С05Ф2; (7.22)
СТАСОВ Хст+»12У2=ОТ1^С05(^ст—Ф])+/ЭТ2У2+
+ОТ2У2С05(^ст—Ф2). \'•'•"^'
Скорости и'\ и у'ч в уравнениях (7.22) и (7.23) определяют по формулам (7.20) и (7.21). Направление отсчета углов Ф| и Ф2 показано на рис. 7.17. Обозначив правые части уравнений (7.22) и (7.23) соответственно через А\ и 5|, можно найти скорости автомобилей перед ударом:
vi ==А\ — В|С05 ^стД/п^т2^);
»2==В| —Л|СОЗ ^ч/^ЗШ2^).
Скорости автомобилей перед перекрестным столкновением, определенные описанным способом, являются минимально возможными, так как в расчетах не учтена энергия, затраченная на вращение обоих автомобилей. Фактические скорости могут быть на 10—20% выше расчетных.
Иногда используют так называемую «приведенную» скорость автомобиля, т. е. такую скорость, при которой автомобиль, наехав на неподвижное препятствие, получает те же разрушения и деформации, что и при столкновении. Принципиальных возражений против такого параметра, естественно, нет, однако достоверные способы его определения отсутствуют.
Техническая возможность предотвратить столкновение. Ответ на вопрос о возможности предотвратить столкновение связан с определением расстояния между автомобилями в момент возникновения опасной дорожной обстановки. Установить это расстояние экспертным путем трудно, а часто и невозможно. Данные, содержащиеся в следственных документах, как правило, неполны или противоречивы. Наиболее точные данные получают путем следственного эксперимента с выездом на место ДТП.
Рассмотрим вначале попутное столкновение.
Если столкновение явилось результатом неожиданного торможения переднего автомобиля, то при исправной тормозной системе заднего автомобиля могут быть только две причины: либо опоздание водителя заднего автомобиля, либо неправильно выбранная им дистанция. При правильно выбранной дистанции и своевременном торможении заднего автомобиля столкновение, очевидно, исключается.
Если фактическая дистанция между автомобилями 5ф известна, то ее сравнивают с дистанцией 5б, минимально необходимой для предотвращения столкновения. Если стоп-сигнал автомобиля-лидера исправен и включается в момент нажатия водителем на тормозную педаль, то минимальная дистанция по условиям безопасности 5б = у'^'{ + /2' + 0,5/?) + (У^/(2П - Уа(<2 + 0,5^) -— {и'а)2/{2^'}, где одним штрихом обозначены параметры переднего автомобиля, а двумя — заднего.
Если оба автомобиля движутся с одинаковой скоростью И ^=у^=Уа, ТО 5б=иа[^/+(<2/-^)+0,5(й'-й)]+
+^(1/Г-1/Л/2.
Наибольшей безопасная дистанция должна быть при следовании грузового автомобиля за легковым, так как при этом Г{> Г-г, Г{> Гз, и ^//<^/. Если транспортные средства однотипны, то при и'а=у'а==иа дистанция
5б==Уа<Г.
При 5фд^5б можно сделать вывод о том, что водитель заднего автомобиля имел техническую возможность избежать столкновения, а при 5ф<5б—вывод о том, что у него такой возможности не было.
У некоторых автомобилей момент загорания стоп-сигнала не совпадает с началом нажатия на тормозную педаль. Запаздывание может составлять 0,5—1,2 ^ и быть одной из причин ДТП.
Предотвратить встречное столкновение водителям, движущимся по одной полосе, удается лишь в том случае, если оба успеют затормозить и остановить автомобили. Если хотя бы один из автомобилей не остановится, ДТП будет неизбежным.
Рассмотрим возможность предотвращения встречного столкновения. На рис. 7.18 в координатах «путь—время» показан процесс сближения двух автомобилей / и 2. Римскими цифрами отмечены следующие их положения:
/ — в момент, когда водители могли оценить сложившуюся дорожную обстановку как опасную и должны были принять необходимые меры для ее ликвидации;
// — в моменты, когда каждый из водителей в действительности начал реагировать на возникшую опасность;
/// — в моменты, соответствующие началу образования следов, юза на покрытии (начало полного торможения);
IV— в момент столкновения автомобилей.
Цифрами V отмечены по- ^ ложения автомобилей, в которых они остановились бы, если бы не столкнулись, а продолжали двигаться в заторможенном состоянии (предположительная версия).
|
Расстояние между авто- о мобилями в момент возникновения опасной обстановки
5е. Участок //-/// СООТВет-р,, у.18 График движения авто- СТВует движению аВТОМОби- мобиля при встречном столкновении
лей с постоянными скоростями за суммарное время Т| (Гг). Расстояния 5а1 и 5а2, отделявшие автомобили от места столкновения в начальный момент, должны быть определены следственным путем, так же, как их начальные скорости Оа1 и Уа2.
Очевидное условие возможности предотвратить столкновение: расстояние видимости должно быть не меньше суммы остановочных путей обоих транспортных средств:
5в==5а1+5а2>5о1+5о2, ГДС ИНДСКСЫ 1 И 2 ОТНОСЯТСЯ К
соответствующим автомобилям. Для реализации этого условия водители должны одновременно реагировать на возникшую опасность для движения и без промедления начать экстренное торможение. Однако, как показывает экспертная практика, такое случается редко. Обычно водители некоторое время продолжают сближаться, не снижая скорости, и тормозят со значительным опозданием, когда столкновение невозможно предотвратить. Особенно часты такие ДТП в ночное время, когда один из водителей выезжает на левую сторону дороги, а недостаточная освещенность затрудняет определение расстояний и распознавание транспортных средств.
Для установления причинной связи между действиями водителей и наступившими последствиями нужно ответить на вопрос: имел ли каждый из водителей техническую возможность предотвратить столкновение, несмотря на неправильные действия другого водителя? Другими словами, произошло ли столкновение автомобилей, если бы один из водителей реагировал на опасность своевременно и затормозил раньше, чем он это сделал в действительности, а другой водитель действовал так же, как в ходе ДТП. Для ответа на этот вопрос опре-
деляют положение в момент остановки одного из автомобилей, например первого, при условии, что его водитель своевременно реагировал бы на опасную обстановку. После этого находят положение второго автомобиля в момент остановки, если бы он не был задержан при столкновении.
Условие возможности предотвратить столкновение для водителя автомобиля /
•^а! ^^*^о1 т Опн2»
для водителя автомобиля 2
5а2 ^ 5о2-г- 5пн1,
где 5пн1 и 5пн2 — расстояния, на которые переместились бы автомобили от места столкновения до остановки, если бы не были задержаны.
Примерная последовательность расчета при оценке действий водителя автомобиля / такова.
1. Скорость второго автомобиля в момент начала полного торможения
ию2="а2-0,5ЙТ,
где Г{ — время нарастания замедления автомобиля 2; ]" — установившееся замедление того же автомобиля.
2. Путь полного торможения второго автомобиля
5^==^2/(2Г).
3. Расстояние, на которое переместился бы второй автомобиль до остановки от места наезда, если бы не произошло столкновения,
5пн2 ^ 54' —5ю2,
где 5ю2 — длина следа юза, оставленного на покрытии вторым автомобилем перед местом столкновения.
4. Остановочный путь первого автомобиля 5о1 =
=Т'и^+У^/(2Г).
5. Условие возможности для водителя первого автомобиля предотвратить столкновение, несмотря на несвоевременное торможение второго водителя: 5а1 >5о1+5пи2.
Если это условие соблюдено, то водитель первого автомобиля имел техническую возможность при своевременном реагировании на появление встречного автомо-
биля остановиться на расстоянии, исключавшем столкновение.
В такой же последовательности определяют, была ли такая возможность у водителя второго автомобиля.
Пример. На дороге шириной 4,5 м произошло встречное столкновение двух автомобилей: грузового ЗИЛ-130-76 и легкового ГАЗ-3102 «Волга». Как установлено следствием, скорость автомобиля ЗИЛ-130-76 была примерно 15 м/с, а скорость автомобиля ГАЗ-3102 —
25 м/с.
При осмотре места ДТП зафиксированы тормозные следы. Задними шинами грузового автомобиля оставлен след юза длиной 16 м, а задними шинами легкового автомобиля — след юза длиной 22 м. В результате следственного эксперимента с выездом на место ДТП установлено, что в тот момент, когда каждый из водителей имел техническую возможность обнаружить встречный автомобиль и оценить дорожную обстановку как опасную, расстояние между автомобилями было около 200 м. При этом автомобиль ЗИЛ-130-76 находился от места столкновения на удалении примерно 80 м, а автомобиль ГАЗ-3102 «Волга»—на удалении около 120 м. Данные, необходимые для расчета:
автомобиль ЗИЛ-130-76 Г =1,4 с; Г» =0,4 с; /'=4,0 м/с2;
автомобиль ГАЗ-3102 «Волга» Г'=1,0 с; й'=0,2 с;;"=5,0 м/с2. Определить наличие технической возможности предотвратить столкновение автомобилей у каждого из водителей. Решение.
1. Остановочные пути автомобиля ЗИЛ-130-76 5„1=15-1,4+ +225/(2-4,0) =49,5 м; автомобиля ГАЗ-3102 «Волга» 5„2=25.1,2+ +625/(2.5,0) =92,5 м.
2. Условие возможности предотвратить столкновение: 5о|+5о2==
•=49,5+92,5=142,0 м; 142,0<5в=200 м.
Сумма остановочных путей обоих автомобилей меньше расстояний, отделявших их от места предстоящего столкновения. Следовательно, если бы оба водителя правильно оценили создавшуюся дорожную обстановку и одновременно приняли правильное решение, то столкновения удалось бы избежать. После остановки автомобилей между ними оставалось бы расстояние около 58 м: Л5==(80+120)—
—(49,5+92,5) =58 м.
Определим, какой из водителей имел техническую возможность предотвратить столкновение, несмотря на неправильные действия другого водителя. Вначале возможные действия водителя ЗИЛ-130-76.
3. Скорость автомобиля ГАЗ-3102 «Волга» в момент начала полного торможения Ою2=25—0,5 -0,2.5,0 =24,5 м/с.
4. Путь полного торможения автомобиля ГАЗ-3102 «Волга» 5?= 24,57(2.5,0) =60,0 м.
5. Перемещение автомобиля ГАЗ-3102 «Волга» от места столкновения в заторможенном состоянии при отсутствии столкновения 5пн2 =60,0—22,0=38,0 м.
6. Условие возможности для водителя ЗИЛ-130-76 предотвратить столкновение: 5о1 + 5пн2 = 49,5 + 38,0 =87,5> 5а1 ==80 м.
Водитель автомобиля ЗИЛ-130-76 даже при своевременном реагировании на появление автомобиля ГАЗ-3102 «Волга» не имел технической возможности предотвратить столкновение.
7. Аналогичные расчеты проводим применительно к водителю автомобиля ГАЗ-3102 «Волга»:
и„1=15—0,5.0,2.4,0=14,6 м/с;
Х^Н.б^^.О^б.б м;
5„,1=26,5—16,0=10,5 м2;
5„г+5„„ |==92,5 +10,5 =103 м<5,г==120 м.
Как показали • расчеты, водитель автомобиля ГАЗ-3102 «Волга» имел реальную техническую возможность предотвратить столкновение, несмотря на то, что водитель ЗИЛ-130-76 опоздал с началом Экстренного торможения.
Таким образом, хотя оба водителя несвоевременно реагировали на появление опасности и оба затормозили с некоторым опозданием, но только один из них в создавшейся обстановке располагал возможностью предотвратить столкновение, а второй — такой возможности не имел. Чтобы объяснить полученный вывод, определим перемещение каждого автомобиля за время, просроченное его водителем.
Перемещение автомобиля ЗИЛ-130-76
5э,,„1=5.1+5„„1—5о] =80+10,5—49,5=41,0 м. Перемещение автомобиля ГАЗ-3102 <Волга»
5з.п2=5,2+5„н2—5о2= 120 +38— 92,5=65,5 м.
Перемещение автомобиля ГАЗ-3102 «Волга» за время запаздывания водителя (65,5 м) примерно в 1,5 раза больше перемещения автомобиля ЗИЛ-130-76 (41,0 м). Поэтому его водитель имел техническую возможность избежать наезда. Водитель автомобиля ЗИЛ-130-76 не имел такой возможности.
Рассматривая способы предотвратить перекрестное столкновение так же, как и выше, устанавливают, успевал ли водитель выполнить необходимые действия, когда возникла объективная возможность обнаружить опасность столкновения. Водитель, пользующийся преимущественным правом на движение, должен принимать необходимые меры безопасности с момента, когда он может определить, что другое транспортное средство при дальнейшем движении может оказаться на полосе следования его автомобиля. Момент возникновения опасной обстановки должен быть определен следствием или судом, так как при субъективном определении этого момента возможны разноречивые толкования и существенные ошибки. Так, например, в некоторых методических источниках встречается указание, что опасная обстановка возникает в момент, когда водитель автомобиля может
обнаружить другое транспортное средство на таком расстоянии, на котором его водитель уже не может остановиться, чтобы уступить дорогу (т. е. когда другое транспортное средство приблизилось на расстояние, равное тормозному следу). Для практической реализации этого положения водитель должен точно определить скорость приближающегося транспортного средства, его тормозные свойства и качество дороги, вычислить длину тормозного пути и сравнить ее с фактической дистанцией, наблюдаемой им. Нереальность подобной операции очевидна.
При анализе столкновений на закрытых перекрестках учитывают ограничение обзорности, применяя методику расчета удаления, аналогичную описанной в гл. 5.
Контрольные вопросы
1. Что такое коэффициент восстановления? Как он характеризует процесс удара?
2. Опишите центральный и внецентренный удары.
3. Как изменяется скорость автомобиля при его наезде на жесткое неподвижное препятствие?
4. Как определить начальную скорость автомобиля перед наездом его на неподвижное препятствие: а — при центральном ударе; б — при внецентренном ударе?
5. В какой последовательности анализируют столкновение автомобилей?
6. Как определить возможность предотвратить попутное столкновение (встречное столкновение)?
Дата добавления: 2015-10-16; просмотров: 459 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| СТОЛКНОВЕНИЕ АВТОМОБИЛЕЙ | | | ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ И МЕХАНИЗАЦИИ АВТОТЕХНИЧЕСКОЙ ЭКСПЕРТИЗЫ |