|
Читайте также: |
Задание.
Содержание.
Введение. 4
1.Получение передаточной функции разомкнутой системы. 5
2.Получение передаточной функции замкнутой системы. 8
3.Получение области устойчивости в плоскости одного параметра. 9
4. Исследование устойчивости замкнутой системы. 13
4.1.Критерий Михайлова. 13
4.2.Критерий Гурвица. 14
4.3.Критерий Рауса. 15
4.4.Критерий Найквиста. 16
5.Построение частотных характеристик. 19
5.1.ФЧХ. 19
5.2.АЧХ. 20
5.3.АФЧХ. 21
5.4.ЛАЧХ. 21
5.5.ВЧХ. 22
6.Определение запасов устойчивости. 23
6.1. Запас устойчивости по амплитуде. 23
6.2. Запас устойчивости по фазе. 24
7.Построение графика переходного процесса по ВЧХ. 26
8.Оценка качества САУ. 29
9.Улучшение показателей качества. Определение передаточной функции корректирующего устройства. 30
Заключение. 34
Список литературы. 35
Приложение А. 36
Приложение Б. 37
Введение.
Теория автоматического управления изучает методы математического моделирования, анализа и синтеза систем автоматического управления (САУ).
Под САУ понимается совокупность объекта управления (ОУ) и управляющего устройства (УУ).
Под объектом управления понимается некий механизм, агрегат, устройство, некий технологический энергетический, экономический, социальный процесс, желаемое поведение которого должно быть обеспечено.
Поведение объекта управления, результат его функционирования определяется некоторыми показателями. Чаще всего ими являются значения величин, называемых входными.
В реальных условиях на каждый объект управления многочисленные воздействия оказывает окружающая среда. Из всего многообразия воздействий в поле зрения оставляют лишь те, которые оказывают наибольшее влияние на выходные величины.
Входные воздействия с точки зрения их влияния на ОУ разделяются на две принципиально отличные группы. Некоторые из них обеспечивают желаемое изменение поведения объекта, достижение поставленных целей, такие входные воздействия называются управляющими, при их отсутствии задача управления вообще не имеет места. Другие входные воздействия мешают достижению цели управления и называются возмущающими или помехами.
Задача управления заключается в формировании такого закона изменения управляющих воздействий, при которых достигается желаемое поведение объекта независимо от наличия возмущений.
Получение передаточной функции разомкнутой системы.
Звенья из приложения:
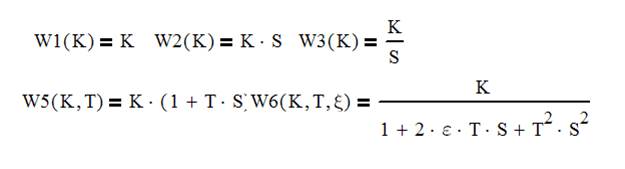
Подставляя численные значения, соответственно варианту, получим:

Исходная структурная схема:
Рисунок 1. Исходная схема.
Перенесем узел б: 
Рисунок 2. Перенос узла б.
Преобразуем контур с обратной связью: 
Рисунок 3. Преобразование контура с обратной связью.
Преобразуем последовательное соединение:
Рисунок 4. Преобразование последовательного соединения.
Преобразуем контур с обратной связью:
Рисунок 5. Преобразование обратной связи.
Преобразуем параллельное соединение:
Рисунок 6. Преобразование параллельного соединения.
Преобразование последовательного соединения
Рисунок 7. Преобразование последовательного соединения.
Получим передаточную функцию разомкнутой системы:

1) 
2) 
3) 

Дата добавления: 2015-09-03; просмотров: 84 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Месяц октябрь | | | Получение области устойчивости в плоскости одного параметра. |