|
Читайте также: |
Схема інтервального таймера знаходить широке застосування в МПС для підрахунку числа зовнішніх подій, програмного задання часових інтервалів, генерування імпульсів необхідної частоти і довжини. Вона представляє собою трьох канальний програмний пристрій. У відповідності до УГЗ (рис. 2.22.). таймер має 8 інформаційних виходів D0 - D7 , кожен канал має два входи:
1. Сi – вхід лічильника;
2. Pi – дозвіл підрахунку;
п’ять керуючих входів:
1.  – читання;
– читання;
2.  – записи;
– записи;
3.  – вибір кристала;
– вибір кристала;
4. А1 – А0 – два молодших розряди адреси.

Рис. 2.23. УГЗ інтервального таймера 8254.

Рис. 2.24. Структура таймера 8254.
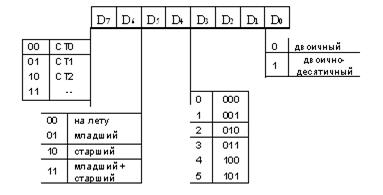
Рис. 2.25. Структура керуючого слова
Структура таймера представлена на рис. 2.24. Таймер має три канали К0 – К2 , кожен з яких складається з 16–розрядного лічильника, початковий код якого заноситься з МП. Кожен лічильник може працювати в режимі двійкового чи двійково-десяткового обчислення. Кожен вхідний сигнал при наявності сигналу дозволу зменшує значення лічильника на 1, а при досягненні в лічильнику коду 0 виробляється вихідний сигнал Qi. Програмування лічильника здійснюється спеціальним словом, яке завантажується в регістр режима з МП. Крім лічильника, в склад таймера включається буфер даних, який поєднує (рис. 2.25) СШД з внутрішньою ШД, і схема керування обміном СКО (СУО), логіка роботи якої та напрямок передачі інформації в залежності від керуючих сигналів приведені в таблиці 2.3.
Таблиця 2.3

Запрограмувати роботу одного з лічильників схеми 8253/8254 можна за допомогою команд введення IN (перша команда заносить керуюче слово, за допомогою інших двох команд введення IN в лічильник заноситься спочатку молодший, а потім старший байт його початкового стану).
Програмування режиму роботи канала здійснюється за допомогою керуючого слова, окремі розряди якого мають наступний зміст (рис. 2.25.):
D0 - визначає режим обчислень (двійковий, десятковий);
D6, D7 - визначає, до якого лічильника відноситься керуюче слово;
D5-D4 – визначає, яким чином може бути здійснене зчитування внутрішнього стану лічильника. При коді 01 зчитаються 8 старших розрядів, при коді 10 – молодший, при коді 11- спочатку молодший, потім старший. При читанні інформації робота лічильника припиняється, тобто сигнал дозволу обчислення перекриває вхід. Така ситуація не завжди допустима. Тому при коді 00 передбачається зчитування без зупинки - робота лічильника (“на льоту”);
D1 -D3 – визначає порядок вироблення вихідного сигналу Q0 , тобто які функції виконує лічильник:
000 - програмований таймер (нульовий режим);
001 – програмований одновібратор;
010 – програмований дільник частоти;
011 – програмований генератор змінної частоти імпульсів;
100 – програмований строб;
101 – програмований строб з апаратним зовнішнім запуском;
В якості прикладу розглянемо роботу в нульовому режимі. Нульовий режим здійснюється наступним чином: в момент запису початкового коду N на виході Qi з’являється низький потенціал, кожен вхідний імпульс зменшує N на 1. В момент досягнення нульового стану вихід Q стає високим. Цей сигнал можна використати як сигнал ЗБР (ЗПР). Нульовий режим може бути використаний для підрахунку зовнішніх подій, або для обробки часових інтервалів необхідної протяжності.
Таймер 8253 забезпечує підрахунок числа вхідних сигналів, які надходять з частотою 0 – 2 МГц, таймер 8254 працює з частотою 0 – 8 МГц.
Дата добавления: 2015-10-28; просмотров: 178 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Контролер прямого доступу до пам’яті 8237А | | | Система реального часу |