Читайте также:
|
Рассмотрим задачу повышения качества управления с помощью каскадных систем регулирования (Cascade Control). Каскадные системы – системы, построенные по иерархическому признаку, и представляют особый вид 2-х (много) уровневых систем. Характерная особенность: только на нижнем уровне управляющее воздействие реализуется с помощью изменения потока энергии, вещества и т. д. Одним из наиболее распространенных типов каскадных систем являются системы со стабилизирующим регулятором. Структурная схема такой системы имеет следующий вид.
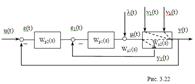

Здесь Р1 – стабилизирующий регулятор (вспомогательный, подчиненный), а Р2 – корректирующий регулятор (основной, командный).
Эффективность применения сх. На управляемый объект действуют сильные возмущения со стороны регулирующего органа (внутренние возмущения). Есть некоторые промежуточные переменные, кот характеризуются значительно меньшей величиной транспортного и инерционного запаздывания по отношению к возмущению, чем основная управляемая величина. Напр, регулирование температуры верха ректификационной колонны изменением расхода флегмы. Расход флегмы поддерживается вспомогательным регулятором, а основной регулятор решает задачу стабилизации температуры укрепляющей части колонны. Такую систему обычно называют: «система стабилизация расхода флегмы с коррекцией по температуре верха колонны». Вых корд-та главного регулятора является заданием вспомогательному регулятору. Внутренний вспомогательный контур управления представляет следящую систему, а основной решает задачу отработки внешних возмущений.
Рассмотренная система включает два управляющих устройства. Если применяется ПИ-алгоритм, то условие оптимальной настройки необходимо решать, рассматривая 4 параметра настройки; а если ПИД, то шесть параметров (4-х и 6-ти мерное пространство).
Принцип построения такой системы предполагает, что она будет эффективна, если инерционность по каналам основных и вспомогательных величин значительно отличается друг от друга. Поэтому расчет такой системы проводят, предполагая, что можно рассчитать какой-либо один контур независимо от другого, а следующий контур рассчитывается с учетом найденных на 1-ом шаге настроечных параметров. Таким образом, реализуется принцип декомпозиции, когда оптимизационная задача решается последовательно путем решения более простых задач. Если инерционность основного контура значительно больше инерционности вспомогательного контура, то на 1-м этапе рассчитываются обычными методами настройки стабилизирующего регулятора, а на 2-ом этапе рассчитываются настройки основного корректирующего регулятора. На втором этапе в структуру ОУ включен стабилизирующий контур регулирования, и передаточная функция виртуального эквивалентного объекта имеет вид
 .
.
При другом способе расчета на первом шаге рассчитываются настройки основного регулятора. Передаточная функция эквивалентного объекта в этом случае принимает вид
 .
.
Эти методы предполагают возможность расчета, какого – либо контура регулирования независимо от другого. Такое предположение проверяется моделированием системы. На этапе моделирования возможен поиск оптимальных настроек по прямым показателям качества, если это необходимо.
На стадии реализации двухконтурной системы необходимо учесть ее следующие особенности. Потеря информационного сигнала по вспомогательной переменной делает систему структурно неустойчивой. Это происходит, если в законах основного и вспомогательного регулятора есть интегральная составляющая. Потеря информационного сигнала по основной переменной приводит регулирующий орган в одно из крайних положений. В связи с этим повышаются требования по надежности информационных каналов. Для исключения состояния неустойчивости на выходе основного регулятора устанавливается блок ограничения сигнала (реализуется аппаратно или программно). Блок ограничения сигнала является элементом с нелинейной характеристикой. При форс-мажорных обстоятельствах в такой системе, как правило, возникает режим автоколебаний (управляемый режим работы системы).
Каскадная сх регулирования в сравнении с одноконтурной системой эффективна только при отработке внутренних возмущений. При появлении проблем с реализацией внутреннего контура, вызванных его быстродействием идут на применение статического закона регулирования. Обычно такая проблема возникает в пневматических системах регулирования, в контурах стабилизации расхода жидкости.
Вопрос 23. АСР с добавочными информационными каналами. Расчет систем с дифференциатором.
 Одним из вариантов каскадной системы регулирования является схема с дифференциатором (АСР с дополнительным импульсом по производной от промежуточной регулируемой величины, АСР с опережающим «скоростным» сигналом). Такие системы представляют вариант двухконтурной схемы, использующие только один регулятор, на вход которого подается не только основная регулируемая величина, но и некоторая вспомогательная промежуточная переменная. Обычно эти системы применяют при автоматизации объектов, в которых регулируемый технологический параметр (например, температура или состав) распределен по пространственной координате (как в аппаратах колонного или трубчатого типа). Особенность таких объектов состоит в том, что основной регулируемой координатой является технологический параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход. При этом одноконтурные замкнутые АСР не обеспечивают должного качества переходных процессов вследствие большой инерционности канала регулирования.
Одним из вариантов каскадной системы регулирования является схема с дифференциатором (АСР с дополнительным импульсом по производной от промежуточной регулируемой величины, АСР с опережающим «скоростным» сигналом). Такие системы представляют вариант двухконтурной схемы, использующие только один регулятор, на вход которого подается не только основная регулируемая величина, но и некоторая вспомогательная промежуточная переменная. Обычно эти системы применяют при автоматизации объектов, в которых регулируемый технологический параметр (например, температура или состав) распределен по пространственной координате (как в аппаратах колонного или трубчатого типа). Особенность таких объектов состоит в том, что основной регулируемой координатой является технологический параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход. При этом одноконтурные замкнутые АСР не обеспечивают должного качества переходных процессов вследствие большой инерционности канала регулирования.

Подача на вход регулятора дополнительного импульса из промежуточной точки технологического аппарата дает опережающий сигнал, и регулятор включается в работу прежде, чем выходная координата отклонится от заданного задания. Если основное возмущение является внутренним возмущением, то такая система регулирования аналогична системе со стабилизирующим регулятором. Предпочтение схеме с промежуточным дифференцированием практически объясняется только тем, что при определенных условиях устройство дифференцирования (дифференциатор) оказывается проще, чем дополнительный стабилизирующий регулятор (применение микропроцессорной техники снимает такое ограничение). Но в практике автоматизации встречаются объекты, в которых схема с дифференциатором принципиально необходима при решении задачи управления.
В рассматриваемой схеме с дополнительным информационным каналом необходимость установки дифференциатора определяется требованием обеспечения астатизма по основной управляемой величине в установившемся режиме
 .В установившемся состоянии сигнал по вспомогательной величине должен исчезнуть
.В установившемся состоянии сигнал по вспомогательной величине должен исчезнуть  и
и  , если
, если  . С этой целью вспомогательную координату пропускают через дифференциатор.
. С этой целью вспомогательную координату пропускают через дифференциатор.
Эффективность введения дополнительного импульса зависит от точки его отбора. Выбор последней определяется в каждом конкретном случае динамическими свойствами объекта и условиями его работы. Системы с дифференциатором рассчитываются аналогично каскадным системам после соответствующих преобразований. В качестве дифференциатора применяют реальное дифференцирующее звено
 .
.
Расчетную схему с дифференциатором можно преобразовать к следующему виду,
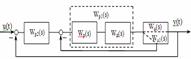
 ,
,
а  .
.
Расчет ведется следующим образом: на первом шаге определяются параметры дифференциатора, на втором шаге параметры основного регулятора. Расчеты многоконтурных систем представляют итерационную процедуру, так как настройки основного и вспомогательных регуляторов взаимозависимы.
Дата добавления: 2015-10-21; просмотров: 327 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 21. Расчет позиционных систем регулирования. Методика Клюева. | | | Вопрос 24. АСР с добавочными информационными каналами. Расчет комбинированных систем. |