Читайте также:
|
АСУ ТП предст. иерархически организованную 2х или 3-хуровневую систему, выполняющую функции: - сбора информации о состоянии (ТОУ);
поддержание технологических параметров на заданных значениях (уставках); контроль за технологическими параметрами, для которых не выполняется функция регулирования; сигнализация о параметрах, значения которых вышли за пределы, рассматриваемые как предельно допустимые; блокировка управлений, являющихся результатом ошибочных действий технологического персонала; противоаварийная защита (ПАЗ) процесса и производства при возникновении аварийных ситуаций. Эти ф-ции («control») выполняются подсистемами нижнего уровня.
Подсистемами второго и, возможно, третьего уровней выполняются такие функции как: архивирование событий; вычисление по моделям (косвенное измерение) не измеряемых технологических параметров, показателей качества продуктов производства, отдельных технико-экономических показателей; проверка или сведение материальных и энергетических балансов для аппаратов, установок, цехов и т.д.; выработка управлений для предотвращения развития аварийных событий, в частности, подключение резервного оборудования, диагностика наличия и причины неисправности, формирование уставок для подсистем нижнего уровня и т. д.
Решение задач автоматизации производства с применением современных вычислительных технологий происходит в многоуровневой системе управления (компьютерные системы автоматизации производства). Такие системы имеют следующую функциональную структуру

1. I/O (Input/Output), уровень ввода – вывода (сбор технологической информации посредством датчиков и управление исполнительными механизмами, сенсоры и актуаторы);
2. Control (Control Level), системы автоматического контроля и регулирования (автоматические регуляторы, микропроцессорные контроллеры и преобразователи);
3. SCADA (Supervisory Control And Data Acquisition) – система сбора данных и оперативного диспетчерского управления с помощью специального программного обеспечения (PMOT - Рабочее Место Оператора-Технолога);
4. MES (Manufacture Execution System) система исполнения производства; основная задача обработка и фильтрация информации о технологическом процессе с целью его дальнейшего использования средним и верхним эшелоном управления предприятием в реальном масштабе времени;
5. MRP (Manufacture Resource Planning) система автоматизации бухгалтерского учета, планирования, управления финансами и материально-техническим снабжением, организация документооборота.
Все пять уровней системы управления реализует ИАСУП (Интегрированная Автоматизированная Система Управления Предприятием).
Компьютерные средства, образующие СУП, формируют сложную по архитектуре сеть, характ. ос-ть которой – вертикальная иерархия. На каждом уровне реализуется логически обоснованный набор функций, таким образом, создается CIM (Computer Integrated Manufacture) пирамида.
В CIM пирамиде выделяют пять уровней (этажей)
1- уровень датчиков и исполнительных механизмов; 2- уровень процесса; 3- системный уровень; 4- уровень управления; 5- прикладной уровень.
При решении задач реализации (построения) АСУТП обычно используются специализированные программные пакеты, которые условно можно разбить на два подмножества:
1). CASE–средства (Computer Aided Software Engineering). предназначенные для программирования задач, реализуемых подсистемами нижнего уровня АСУТП на промышленных микроконтроллерах;
2). SCADA–системы, которые предназначены для автоматизированного конфигурирования АСУТП, обеспечения высокого уровня сервиса при предоставлении информации.
SCADA–пакеты предназначены для визуализации ТП и удобного представления информации, получили название MMI – систем (Man Machine Interface).
На рис. 5.3 приведена функциональная схема управления, в которой SCADA–система представлена как ядро АСУТП, а всё остальное условно отнесено к АСУП.
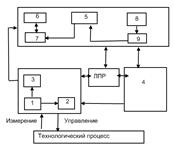
Рис. 5.3 Функциональная схема управления технологическим процессом
1-БД реального времени
2-средства представления инф-ции
3-архив
4-технологический регламент-данные о зависимости величины эксплуатац. затрат от технологич. режима
5-модели ситуационных отношений и прогнозирования
6-база инструкций и прецедентов. Прецедент -спецификация последовательности действий, кот. может осуществить система (класс) при взаимодействии с внешним миром. Понятие заключается в документировании функц. требований программн. средством и образующих сценарий.
7-формирование правил вывода
8-структура объекта
9-конструирование математич. моделей
В зависимости от распределения информационных и управляющих функций между человеком и УВК, между УВК и средствами контроля и регулирования возможны различные принципы построения АСУ ТП. Наибольшее распространение в промышленной практике получили следующие структуры: централизованные АСУ ТП и децентрализованные распределенные АСУ ТП.
Вопрос 7. Распределенные системы управленияТП. Концепции построения и основные задачи РСУ. Функционально-целевая и топологическая децентрализация ТОУ. Архитектура РСУ. Структура КТС.
Распределенной принято считать АСУ ТП, в которой несколько взаимносвязных процессоров выполняют различные функции. В таких системах появляется возможность получения высоких показателей надежности за счет расщепления АСУ ТП на семейство небольших и менее сложных автономных подсистем и дополнительного коллективного резервирования каждой из этих подсистем через сеть (понятие живучести).
Современные системы компьютерной автоматизации строятся с применением принципа РСУ. РСУ предполагают сетевой обмен информацией. Дальнейшее развитие принципа распределенного управления привело к широкому распространению технологии Fieldbus («полевая шина»). Она предполагает использование стандартного серийного порта и витой пары.
Основные задачи решаемые РСУ:
сбор и предварительная обработка информации; автоматическое регулирование; ЛПУ (логико-программное управление), управление процессами в нестационарных режимах их работы; приоритетное управление (на одно и то же устройство, действующее на ТОУ, могут подаваться сигналы с различных подсистем управления); защита и блокировка (как локальная, так и глобальная); оперативное управление; сигнализация; архивирование информации; регистрация событий; неоперативные расчеты; передача информации на более высокий уровень.
Концепции построения современных децентрализованных АСУ ТП:
проблемно-ориентированный подход при построении СУ; распределенное автоматическое управление; объектно-ориентированное управление; централизованный контроль; технологическое программирование; проектная компоновка; самодиагностика и выборочное развитие;
Функционально-целевая децентрализация – это разделение сложного процесса или системы на меньшие части – подпроцессы или подсистемы по функциональному признаку, имеющие самостоятельные цели функционирования.
Топологическая децентрализация означает возможность территориального разделения процесса на функционально-целевые подпроцессы. Число подсистем распределенной АСУ ТП выбирается так, чтобы мимнимизировать суммарную длину линий связи, образующих вместе с локальными подсистемами управления сетевую структуру.
Технической основой современных РСУ являются микропроцессоры и микропроцессорные системы. Распределенная АСУ ТП представляет собой объединение при помощи каналов и устройств связи разнообразных МПС, которое называют локальной вычислительной сетью (ЛВС). Поэтому под архитектурой распределенных АСУ ТП понимают функциональные, логические и физические принципы организации ЛВС.:
1)наличие цифровой связи между компонентами системы управления;
2)интеллектуализация устройств путем встраивания микропроцессорных (МП);
3)приближение вычислительных возможностей к ОУ и повышение эффективности и надежности;
4) независимость контуров регулирования от супервизорной ЭВМ.
Дата добавления: 2015-10-21; просмотров: 327 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Функции и составные части АСУ ТП | | | Классификация и основные характеристики МК ПТК. Стандарт МЭК 61131. |