Читайте также:
|
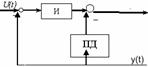
В составе ПО контроллеров примен. модифицированные стандартные алгоритмы. Характерный недостаток ПИД алгоритма-этот алгоритм обладает большой чувствительностью к высокочастотным помехам. Для того, чтобы структурно уменьшить чувствительность ПИД алгоритма к помехам применяют следующие сх:
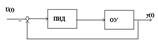
По прямому каналу срабатывает ошибка, т.е. 
 ПФ - предфильтр
ПФ - предфильтр
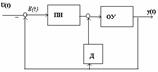
Реал.сис использ модифицированные алгоритмы. Наиболее распространенная сх:
В этом случаи закон работы регулятора 
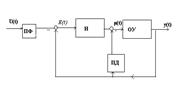
Модифицированный алгоритм в цифровой форме
В контроллерах при реализации типовых алгоритмов учитываются св-ва исполнительного механизма. Делят на 2 группы: ИМ пропорционального действия; ИМ постоянной скорости (необходим ШИМ).
В ремиконтах ПИД алгоритм реализ как РАН. 
Тд=kд Ти
Дифференциальная составляющая реализуется после операции фильтрации

Если используется ИМ постоянной скорости, то конструкция называется РИМ. При цифровой реализации с применен. ШИМ передаточная ф-я регулятора, реализуемая в контроллере имеет вид:
 -постоянный коэффициент;
-постоянный коэффициент;  )- ПДД2
)- ПДД2
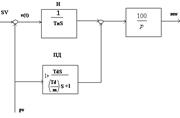
pv- переменная процесса
p-пропорциональный диапазон
мw- управляющее воздействие
st- setpoint variable
e- deviation
Ti – integral time
Td – derivative time
m - derivative gain
Дата добавления: 2015-10-21; просмотров: 170 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 16. Дискретное представление уравнений непрерывных типовых регуляторов. Позиционный и скоростной алгоритмы. | | | Вопрос 19. Задача синтеза СУ на стадии ТЗ. Классификация методов параметрического синтеза АСР |