Читайте также:
|
При синтезе и проектировании локальных систем автоматизации наблюдается «системный парадокс»: для получения модели ОУ необходимо знать алгоритм функционирования управляющего уст-ва, для отыскания которого нужна модель ОУ. При автоматизац ТОУ в нормальном режиме эксплуатации, применяют ПИД алгоритм Такой алгоритм управления можно отнести к экспертным алгоритмам. В первом приближении он реализует действия опытного оператора (эксперта). Алгоритм достаточно простой и предполагает, что объект управления имеет мат модель низкого порядка.
Реалю промышленные ОУ являются недетерминированными динамическими системами. Результат синтеза на стадии проектирования редко устраивает эксплуатационный персонал, так как численные значения параметров контроллеров оказываются отличными от действительных оптим значений. Предварительный синтез скорее нужен для проверки работоспособности предлагаемых структур систем и алгоритмов. Решение задачи параметрического синтеза позволяет оценить возможности проектируемой системы регулирования: определить вр регулирования (быстродействие), динамич точность (выбросы), статическую точность, интенсивность затухания процесса (запас устойчивости).
Процесс определения оптимальных параметров настройки можно представить в виде 2-х принципиально отличающихся алгоритмов:


При наладке работающих систем широко используются экспрессные (приближенные, графоаналитические) методы. Обычно передаточной функцией 1-го или 2-го порядка с запаздыванием. Оценкой динамических свойств является некоторый характерный параметр, например, τ / Тμ – относительное запаздывание..
В том случает если 0< τ / Тμ <=0.2 это объекты с небольшим транспортным запаздыванием.
0.2< τ / Тμ <=0.5 это объекты с относительно большим транспортным запаздыванием.
0.5< τ / Тμ это объекты с большим транспортным запаздыванием.
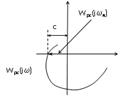 Среди распространенных экспертных методов настройки можно выделить: Метод Циглера – Никольса- предполагает вывод системы на границу устойчивости, т. е. на точку (-1, 0). Методика Такахаши представляет модификацию метода Циглера – Никольса, когда параметры объекта (относительное запаздывание и коэффициент передачи) определяются проведением касательной через точку перегиба временной характеристики. По циглеру-никольсу: 1шаг.это стандартный регулятор изменить на пропорциональный. Система будет на границе устойчивости. Определяем wп=wкр – колебания с П-регулятором. Поскольку режим колебания при нормальной эксплуатации не допустим, то возникает проблема получения колебательной частоты. Тахакаши переделал методику Циглера-Никольса, определив св-ва объекта как звена 1 порядка с запаздыванием.
Среди распространенных экспертных методов настройки можно выделить: Метод Циглера – Никольса- предполагает вывод системы на границу устойчивости, т. е. на точку (-1, 0). Методика Такахаши представляет модификацию метода Циглера – Никольса, когда параметры объекта (относительное запаздывание и коэффициент передачи) определяются проведением касательной через точку перегиба временной характеристики. По циглеру-никольсу: 1шаг.это стандартный регулятор изменить на пропорциональный. Система будет на границе устойчивости. Определяем wп=wкр – колебания с П-регулятором. Поскольку режим колебания при нормальной эксплуатации не допустим, то возникает проблема получения колебательной частоты. Тахакаши переделал методику Циглера-Никольса, определив св-ва объекта как звена 1 порядка с запаздыванием.
В отечественной практике широко использовано несколько экспрессных методов настроек: формула МЗТА(ВТИ), методика Копеловича, методика ИАТ(ИПУ).
Заключающий этап ввода объекта в действие – процедура адаптации. Адаптацию можно реализовать двумя способами. 1) поиск, 2)идентификация ОУ.
Адаптацию систем, основанная на идентификации ОУ можно разделить на 2 группы: 1)активные 2)пассивные. Пассивные группы методов оценивают свойства объекта в режиме нормальной эксплуатации, но в этом случае свойства системы находятся в области частот, которые не являются характерными для системы.
Оценка качества при адаптации. Оценки могут быть прямые, а могут быть косвенные. Прямые – степень затухания, время регулирования, динамическая ошибка. Обычно прямые показатели качества при оценке не применяют, применяют косвенные, которые являются ноу-хау в различных методах.
Дата добавления: 2015-10-21; просмотров: 187 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 19. Задача синтеза СУ на стадии ТЗ. Классификация методов параметрического синтеза АСР | | | Вопрос 21. Расчет позиционных систем регулирования. Методика Клюева. |