Читайте также:
|
+Позиционного нелин регулятора, что они используют максимальную мощность регулирующего воздействия
-возникновение автоколебаний.
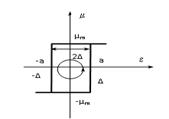
Позиционный регулятор, имеющий симметрическую статическую характеристику 2-х позиционного реле.
 Параметры автоколебаний могут быть определены методом гармонической линеаризации (методом Гольдфарба), в частности широко используется методика Клюева.
Параметры автоколебаний могут быть определены методом гармонической линеаризации (методом Гольдфарба), в частности широко используется методика Клюева.
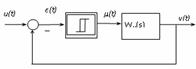
Пусть объект управления представляет собой интегрирующее звено 
Подадим на вход объекта управления ступенчатый сигнал амплитудой mm, тогда  , где
, где  .
.
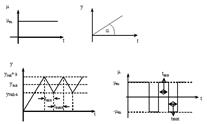
В системе устанавливаются колебания с размахом 
 ,
,  ,
,  , Þ
, Þ  , частота переключений реле
, частота переключений реле  (Тк – период колебаний).
(Тк – период колебаний).
Если при настройке уменьшать Δ↓, то Тк↓ и частота переключений nk↑.
Если же характеристика несимметрична (например, μmax /= 2μmin) то и параметры автоколебаний будут иметь несимметричный характер  ,
, 

Схожие вещи можно построить, рассмотрев процесс самовыравнивания  .
.
В том случае, если объект содержит запаздывание, т.е.  ,
,
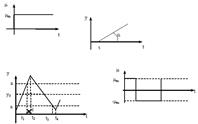
В результате устанавливаются симметричные колебания с периодом и размахом 
 .
.
Период  равен времени включения и времени выключения, если они одинаковы то будет симметричная величина. В том случае если
равен времени включения и времени выключения, если они одинаковы то будет симметричная величина. В том случае если  =0, то мы получим
=0, то мы получим 
В том случае если характеристика несимметрична, то в системе в запаздыванием возникает колебательный режим, который характеризуется смещением средней линии.
 - это смещение средней линии колебания аналогично явлению статизма, т.е. появляется статическая ошибка. Формула Клюева позволяет произвести оценки системы без построения ЧХ системы и ЧХ нелинейности.
- это смещение средней линии колебания аналогично явлению статизма, т.е. появляется статическая ошибка. Формула Клюева позволяет произвести оценки системы без построения ЧХ системы и ЧХ нелинейности.
Дата добавления: 2015-10-21; просмотров: 176 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 20. Итерационные методы автоматизированной настройки действующих промышленных систем управления. | | | Вопрос 22. АСР с добавочными информационными каналами. Расчет систем со стабилизирующим регулятором. |