Читайте также:
|
Необходимость регулирования расхода возникает при автоматизации практически любого непрерывного процесса. АСР расхода предназначены для стабилизации возмущений по материальным потокам. Они являются неотъемлемой частью разомкнутых систем автоматизации технологических процессов. Для обеспечения заданного состава смеси или для поддержания материального и теплового балансов в аппарате применяют системы регулирования соотношения расходов нескольких веществ в одноконтурных или каскадных АСР. Характерные особенности систем регулирования расхода (СРР):
- малая инерционность объекта регулирования;
- наличие высокочастотных составляющих в сигнале изменения расхода. (Причина их возникновения - пульсации давления, которые вызваны работой насосов, или компрессоров, или случайными колебаниями расхода при дросселировании потока через сужающее устройство).
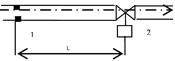
На рис. дана принципиальная схема объекта при регулировании расхода. 1-место установки сужающего устройства (точка измерения расхода), 2-регулирующий орган. Объект находится между точками 1 и 2. Длина этого участка составляет обычно несколько метров. Динамика канала «расход вещества через клапан — расход вещества через расходомер» приближенно описывается апериодическим звеном первого порядка с чистым запаздыванием. Время чистого запаздывания обычно составляет доли секунд для газа и несколько секунд — для жидкости; значение постоянной времени — несколько секунд. Объекта (1).

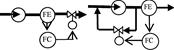
Приближенная оценка чистого запаздывания и постоянных времени отдельных элементов цепи показывает (рис.), что современные первичные преобразователи расхода (2), построенные на принципе динамической компенсации, можно рассматривать как усилительные звенья. Исполнительное устройство (5) аппроксимируется апериодическим звеном первого порядка, постоянная времени которого составляет несколько секунд, причем быстродействие исполнительного устройства существенно повышается при использовании позиционеров. Импульсные пневматические линии, связывающие средства контроля и регулирования (4). При больших расстояниях между элементами цепи необходимо по длине импульсной линии устанавливать дополнительные усилители мощности.
Объект малой инерционности => рабочая частота может оказаться выше максимальной, ограничивающей область нормальной работы промышленного регулятора, в пределах которой реализуются стандартные законы регулирования. За пределами этой области динамич. хар-ки регуляторов отличаются от стандартных => требуется введение поправок на рабочие настройки с учетом фактических законов регулирования.
Закон регулирования выбирается по требуемому качеству переходного процесса. Для регулирования расхода без статической погрешности в одноконтурных АСР применяют ПИ-регуляторы. Если АСР расхода является внутренним контуром в каскадной системе регулирования, регулятор расхода может осуществлять П-закон регулирования. При наличии высокочастотных помех в сигнале расхода применение регуляторов с дифференциальными составляющими в законе регулирования без предварительного сглаживания сигнала может привести к неустойчивой работе системы. Поэтому в промышленных АСР расхода применение ПД- или ПИД- регуляторов не рекомендуется. Три способа изменения расхода:
- дросселирование потока вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка);
- изменение напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора);
- байпасирование, т. е. переброс избытка вещества из основного трубопровода в обводную линию.
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рис. а). Регулирование расхода после поршневого насоса – используют байпассирование потока (рис. 6)., т.к. при работе регулятора клапан может закрыться полностью, что приведет к разрыву трубопровода. Регулирование расхода сыпучих веществ осуществляется изменением степени открытия регулирующей заслонки на выходе из бункера (рис. 4.4,а) или изменением скорости движения ленты транспортера (рис. 4.4,6). Измерителем расхода при этом может служить взвешивающее устройство, которое определяет массу материала на ленте транспортера.


Регулирование соотношения расходов двух веществ можно осуществлять по одной из трех схем.



1. При незаданной общей производительности расход одного вещества (рис. 4.5,a) G1 называемый «ведущим», может меняться произвольно; второе вещество подается при постоянном соотношении g с первым, так что «ведомый» расход равен g G1 . Иногда вместо регулятора соотношения используют реле соотношения и обычный регулятор для одной переменной (рис. 4.5,6). Выходной сигнал реле 6, устанавливающего заданный коэффициент соотношения g, подается в виде задания регулятору, обеспечивающему поддержание «ведомого» расхода.
2. При заданном «ведущем» расходе кроме АСР соотношения применяют и АСР «ведущего» расхода (рис. 4.5,в). При такой схеме в случае изменения задания по расходу G1 автоматически изменится и расход G2 (в заданном соотношении с G1).
Дата добавления: 2015-10-21; просмотров: 766 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Вопрос 24. АСР с добавочными информационными каналами. Расчет комбинированных систем. | | | Вопрос 28. Регулирование уровня. |