Читайте также:
|
Предположим, что на судно действует момент Мкр, не зависящий от угла крена. На диаграмме моментов (рис. 4) он будет изображаться прямой линией, которая пересекается с кривой восстанавливающего момента Mв в точках А и В. Точки А и В являются точками статического равновесия, так как в них соблюдается равенство кренящего и восстанавливающего моментов Мкр = Мв.

Рис. 4. Определение статических углов крена при действии Mкр
В точке А угол θ1 - угол устойчивого равновесия, так как, если судно вывести из положения равновесия в этой точке, увеличив, например, угол θ1 на δθ, то, будучи предоставлено самому себе, судно под действием восстанавливающего моментавернется в прежнее положение. Если же вывести судно из положения равновесия, уменьшив угол на δθ, то оно под действием кренящего момента также вернется в прежнее положение. При этом в точке А
 . (7)
. (7)
В точке В угол θ2 характеризует положение неустойчивого равновесия, так как, если вывести судно из положения равновесия, добавив δθ, кренящий момент будет больше восстанав-ливающего, и оно будет крениться дальше, пока не опрокинется. Если же θ2 уменьшить на величину δθ, получится Мкр < Мв, и судно перейдет в положение равновесия θ1. В точке В
 . (8)
. (8)
Таким образом, только угол θ1 будет углом статического равновесия. Его обозначают θст.
Если Мкр = Мmax, точки А и В сольются в точке касания, получится безразличное равновесие, которое по определению не является остойчивым.
Судно может практически безопасно плавать в наклонном положении при углах, меньших θmax, так как при углах крена, больших θmax, всегда могут найтись такие внешние силы, которые переведут судно из положения равновесия к углу заката диаграммы, и оно опрокинется.
Максимальный кренящий момент Мкр = Mmax, который судно может выдерживать не опроки-дываясь называется предельным статическим кренящиммоментом Mпр.ст. Соответствующий ему угол θmax будет предельным статическим углом крена.
Разница между Мпр.ст и каким-либо статически приложенным моментом характеризует запас статической остойчивости судна.
В случае действия на судно динамически приложенного кренящего момента условием равновесия будет равенство не моментов, а равенство их работ Ткр = Тв, или
 , (9)
, (9)
где θдин - угол крена, соответствующий углу динамического равновесия(рис. 5).
Угол θдин может определяться графически из следующих соображений. Интегралы являются площадями фигур ^ ODFDEO и OACDEO, ограниченными сверху Мкр и Мв, а справа - абсциссой θдин и характеризуют работы соответствующих моментов. Уравнивая площади этих фигур, получаем θдин. Можно этот угол определить и более просто. Так как дважды заштрихованная площадь OADE0 – общая, можно уравнять площади треугольников ОВА и АCD (рис. 6).
Как мы видим, для одного и того же кренящего момента, но приложенного динамически или статически, динамический угол крена больше статического, т.е. θдин > θст.
Максимальный динамически приложенный кренящий момент, который еще не опрокинет судно, определяется из условия приравнивания площадей ОВА и АCD так, чтобы не осталось незаштрихованных площадей между кренящим и восстанавливающим моментами (рис. 7). Этот кренящий момент называется предельным динамическим моментом М.пр.дин. Предельный динамический момент меньше предельного статического момента, т.е. динамически прило-женный кренящий момент опаснее статически приложенного.
Разница между Мпр.дин и каким-либо динамически приложенным кренящим моментом характеризует запас динамической остойчивости.

Рис. 5. Определение θдин

Рис. 6. Определение θдин по упрощенной модели
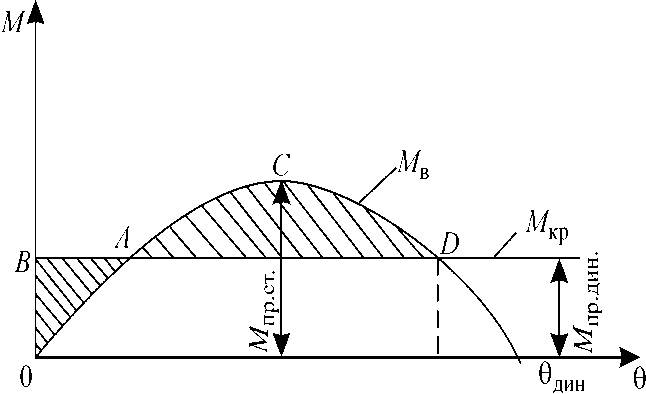
Рис. 7. Определение предельного динамического момента
^ 8.2.2. Задачи, решаемые с помощью диаграмм динамической остойчивости
С помощью диаграммы динамической остойчивости можно решить те же задачи, что и с помощью диаграммы статической остойчивости. Особенно удобно решать задачи об определении динамического угла крена θдин и предельного динамического момента Мпр.дин. Например, если кренящий момент не зависит от θ, работа кренящего момента будет равна,
 , (10)
, (10)
т.е. Ткр - линейная функция от θ. Кстати, если θ =1 радиан, Ткр = Мкр, что можно использовать для построения графика Ткр (θ) (рис. 8). Работа восстанавливающего момента равна
 . (11)
. (11)
Динамический угол крена определится в точке пересечения Tкр и Тв.

Рис. 8. Определение θдин и θст на диаграмме динамической остойчивости
Статические углы крена определятся из равенства моментов, т.е.
 .(12)
.(12)
Следовательно, необходимо провести касательные к кривой Тв параллельно прямой Ткр. В точках касания будет θ1 = θст и θ2.
Предельный динамический момент Мпр.дин можно определить, проведя касательную к кривой Тв из начала координат и измеривординату на расстоянии 1 радиан от начала координат (рис. 9), а предельный статический момент - проведя касательную к кривой Тв в точке перегиба А, соответствующей максимуму диаграммы статической остойчивости, и измерив на расстоянии 1 радиан ординату ВС, отсчитываемую от прямой АВ, параллельной оси абсцисс.

Рис. 9. Определение Мпр.ст и Мпр.дин с помощью диаграммы динамической остойчивости
Дата добавления: 2015-10-13; просмотров: 499 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Плечо статической остойчивости.Восстанавливающий момент при больших наклонениях.Диаграмма статической остойчивости | | | Джерела житлового законодавства |