Читайте также:
|
Выполним моделирование пуска двигателя постоянного тока ДП-62 привода тележки слитковоза, номинальнім напряжением 220 В. Паспортные данные двигателя приведены в таблице 5.1.
Для расчетов переходных процессов прямого пуска при последовательном возбуждении необходимая зависимость магнитного потока от тока якоря  . Для построения зависимости используем универсальную зависимость, в относительных единицах, которая легко аппроксимируется выражением:
. Для построения зависимости используем универсальную зависимость, в относительных единицах, которая легко аппроксимируется выражением:
 .
.
где  - магнитный поток и ток якоря отнесен номинального.
- магнитный поток и ток якоря отнесен номинального.
Таблица 5.1.
Паспортные данные двигателя ДП-62
| Тип возбуждения: | Последовательное | Смешанное | Независимое |
 , кВт , кВт
| 61 | 57 | 56 |
 , А , А
| 325 | 295 | 290 |
 , советов/с , советов/с
| 480 | 590 | 610 |
Сопротивление якоря  , Ом , Ом
| 0,0212 | ||
| К-во главны полюсов | 4 | ||
| К-во витков на полюс | 27 | 5 | 1145 |
| Сопротивление обмотки возбуждения | 0,0205 | 0,0041 | 42 |
| Сопротивление параллельной обмотки | - | 49,2 | - |
| Ном. ток возбуждения, А | - | 3,12 | 3,6 |
| Момент инерции, кг м 2 | 1,875 |
Номинальный магнитный поток рассчитаем по данным номинального режима:

Структурная схема модели при использовании расширения пакета MATLAB - SIMULINK приведенная на рис.5.5.
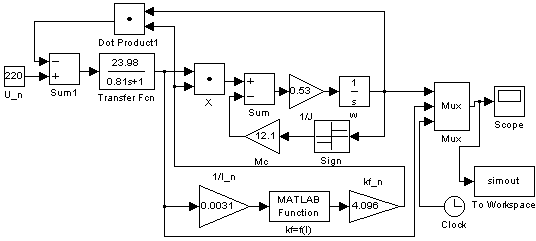
Рис.5.5. Структурная схема модели
На рис.5.6. приведенные диаграммы переходных процессов  и
и  , полученные на указанной модели.
, полученные на указанной модели.

Рис.5.6. Диаграммы переходных процессов
8.2. Моделирование систем подчиненного регулирования
Рассмотрим структурную схему системы подчиненного регулирования.
Объект управленияделится на  подсистем, -вложенных содного во второй контуров управления, причем исходный сигнал предыдущего контура управления является задачей для следующего контура (рис.8.8.).
подсистем, -вложенных содного во второй контуров управления, причем исходный сигнал предыдущего контура управления является задачей для следующего контура (рис.8.8.).
По таким принципам построено большинство систем управления электроприводами механизмов технологических объектов. Чаще всего применяется двухконтурная САК с обратными связями за скоростью и током. Рассмотрим структурную схему двухконтурной САК электроприводом за системой тиристорный преобразователь - двигатель постоянного тока (ТП-Д) (рис.8.9) с внутренним контуром регулированиятока якоря и внешним контуром регулирования угловой скорости.
Как регулятор тока ( ) и скорости (
) и скорости ( ) чаще всего применяются:
) чаще всего применяются:
- пропорциональный (П-Регулятор) с передаточной функцией
 ; (8.10)
; (8.10)
- пропорционально-интегральный (Пи-регулятор) с передаточной функцией
 . (8.11)
. (8.11)
П- Регулятор является частичным случаем Пи-регулятора, при  . Поэтому дальше рассмотрим моделирование Пи-регулятора. Его структурная схема имеет вид, представленный на рис.8.10.а), или в виде удобному для моделирования - на рис.8.10. б).
. Поэтому дальше рассмотрим моделирование Пи-регулятора. Его структурная схема имеет вид, представленный на рис.8.10.а), или в виде удобному для моделирования - на рис.8.10. б).

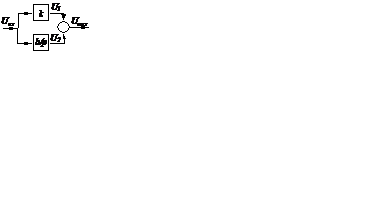
a) б)
Рис.8.10. Структурная схема Пи-регулятора
За последней структурой составим систему уравнений регулятора:
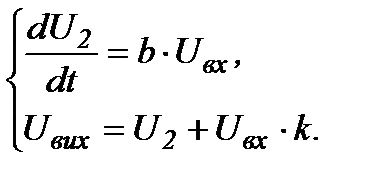 (8.12
(8.12
В реальном Пи-регуляторе процессы описываются болеесложной системой уравнений. Это связано с насыщением операционного усилителя, на базе котороговыполняется регулятор и с наличием элементов ограничения.
Принципиальная схема ПИ-регулятора имеет вид

Рис.8.11. Принципиальная схема Пи-регулятора
В системе подчиненного регулирования ограничивают выходной сигнал регулятора на необходимом уровне. Технически это осуществляется введениемв круг обратной связи, например, стабилитронов  и
и  . Выходное напряжение ограничивается напряжением пробоя стабилитронов. В результате этого при росте сигнала
. Выходное напряжение ограничивается напряжением пробоя стабилитронов. В результате этого при росте сигнала  выше напряжения пробоя напряжение
выше напряжения пробоя напряжение  не меняется.
не меняется.
На структурной схеме эти нелинейности (насыщениеОП и ограничение) учитываются с помощью нелинейного звена типа “насыщение” (рис.8.12).

Рис.8.12. Структурная схема регулятора с учетом насыщения
Однако такое представление не учитывает физику процессов в регуляторе. В реальном ОПизменение выхода интегральной части регулятора отвечаетизменению заряда конденсатора  . При срабатывании круга ограничения или выходаОП у насыщения, заряд на конденсаторе перестает увеличиваться. Это означает, что интегрирующая часть не работает, то есть ее исходное значение не меняется. В приведенной структурной схеме это не учтено, потому что после прекращения изменения выхода регулятора сигнал на входе звена насыщения продолжает увеличиваться.
. При срабатывании круга ограничения или выходаОП у насыщения, заряд на конденсаторе перестает увеличиваться. Это означает, что интегрирующая часть не работает, то есть ее исходное значение не меняется. В приведенной структурной схеме это не учтено, потому что после прекращения изменения выхода регулятора сигнал на входе звена насыщения продолжает увеличиваться.
Рассмотрим возможность учета этого явления в уравнениях ПИ-регулятора.
В алгоритме необходимо на каждом шагу интегрирования осуществить проверку выхода регулятора:
если  , то
, то 
При выполнении этого условия интегральная часть перестает меняться.
Кроме того, необходимо ограничить и общий исходный сигнал регулятора путем введения в алгоритм следующего условного оператора:
если , то  .
.
Окончательная система уравнений ПИ-регулятора:
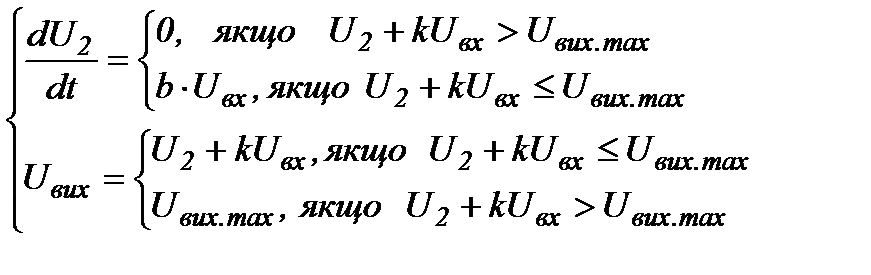 (8.13)
(8.13)
Дата добавления: 2015-10-29; просмотров: 263 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Момент сопротивления кузнечно-штамповочных машин. | | | Расчеты параметров асинхронного двигателя по данным каталога |