Читайте также:
|
При рассмотрении поведения ЭМС в переходных режимах необходимо принимать во внимание присущие им нелинейности.
1. Нелинейности в системах электропривода могут быть обусловленные такими факторами:
2. Нелинейности механических характеристик электродвигателей, например: механические характеристики асинхронных двигателей, двигателей постоянного тока последовательного и смешанного возбуждения.
3. Нелинейности характеристик нагрузки (статического момента).
 а)
а) 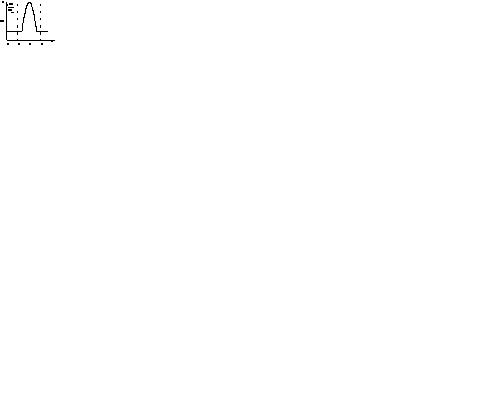 б)
б)
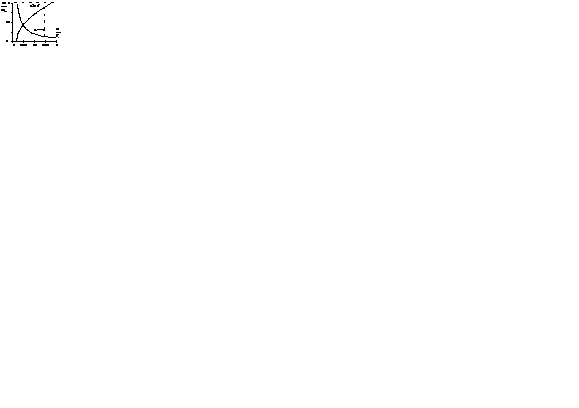
Рис.3.1. Нелинейности обусловленные характеристиками нагрузки
Например: вентиляторная характеристика турбомеханизмов ( ); характеристики металлорежущих станков (
); характеристики металлорежущих станков ( ) рис.3.1,а); ножницы для резания металла (
) рис.3.1,а); ножницы для резания металла ( ) рис.3.1,б).
) рис.3.1,б).
Нелинейностями конструкции и свойств механической передачи. Типичными примерами является наличие в передачах зазоров и люфтов, нелинейность характеристики соединения между валами.
Нелинейности сил трения.
а) внутреннее вязкое трение, определяется силами, которые действуют в подшипниках и соединениях. Для подшипников скольжения в диапазоне малых скоростей 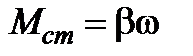 (рис.3.2.а) - 1); при больших
(рис.3.2.а) - 1); при больших  более точной есть нелинейная зависимость (рис.3.2.а) - 2);
более точной есть нелинейная зависимость (рис.3.2.а) - 2);
 а)
а)  б)
б)  в)
в)
Рис.3.2. Нелинейные характеристики моментов трения:
а) внутреннее вязкое трение; б) кулоновское трение; в) сухое трение.
Нелинейные ветви характеристик иногда приблизительно заменяют прямыми (рис.3.2.а-в).
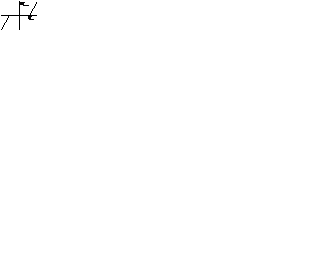
4. Нелинейности элементов системы управления электропривода.
К нелинейностям, обусловленным элементами систем управления электропривода относят нелинейные элементы, с помощью которых осуществляется токоограничение в замкнутых системах автоматического управления рис.3.3,а); элементы с ограниченной величиной рабочего участка рабочей характеристики - магнитные усилители (МП), полупроводниковые сумматоры (рис.3.3, б); элементы, которые имеют область насыщения (рис.3.3, в) и др.
 а)
а) 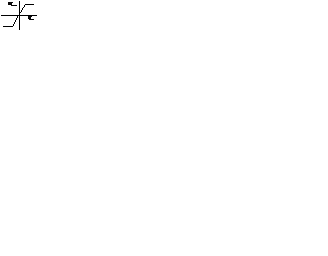 б)
б) 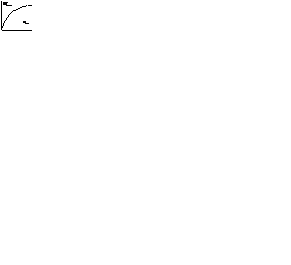 в)
в)
Рис.3.3. Нелинейности элементов систем управления электропривода
Нелинейности функциональных влияний.
Нелинейности типа произведения двух функций, квантование по уровню и временами в цифровых САК.
5. Нелинейности, обусловленными свойствами преобразователей электрической энергии.

Рис.3.4. Нелинейность регулировочной характеристики
Сюда относятся, например, нелинейности регулировочной характеристики  тиристорного преобразователя (рис.3.4.); наличием зоны прерывчатых токов; неполной управляемостью преобразователей и др.
тиристорного преобразователя (рис.3.4.); наличием зоны прерывчатых токов; неполной управляемостью преобразователей и др.
Рассмотренные нелинейности являются основными, но не исчерпывают всего разнообразия нелинейностей. Электромеханическая система может иметь сразу несколько нелинейностей, и необходимо выделить наиболее важные, которые существенно влияют на показатели работы исследуемого объекта.
Нелинейности можно поделить на две группы:
- аналитические - такие, что могут быть представленные системой кусочно- непрерывных уравнений.
- неаналитические - такие, которые представлены в виде графиков или таблиц.
Дата добавления: 2015-10-29; просмотров: 146 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Типовой алгоритм и структура программы для решения систем дифференциальных уравнений | | | Типовые аналитические нелинейности ЭМС. |