Читайте также:
|
Для цифрової обробки сигналів використовуються сигнальні процесори (DSP). Відмінною особливістю завдань цифрової обробки сигналів є потоковий характер вхідних сигналів, що вимагає від технічних засобів високої продуктивності і забезпечення інтенсивного обміну із зовнішніми пристроями.
Цифрова обробка сигналу (ЦОС) — це арифметична обробка в реальному масштабі часу послідовності значень амплітуди сигналу, що отримується через рівні часові проміжки. Прикладами цифрової обробки є:
− фільтрація сигналу;
− згортка двох сигналів (змішення сигналів);
− обчислення значень кореляційної функції двох сигналів;
− фільтрація, обмеження або трансформації сигналу;
− пряме/обернене перетворення Фур’є сигналу.
Аналогова обробка сигналу, є в більшості випадків більш дешевим способом досягнення необхідного результату, проте тоді, коли потрібна висока точність обробки, стабільність характеристик в різних температурних умовах функціонування, цифрова обробка виявляється єдино прийнятним рішенням.
 Рис.5.1. Схема цифрової обробки сигналу.
Рис.5.1. Схема цифрової обробки сигналу.
На рис.5.1 показана схема цифрової фільтрації сигналу. Компонентами схеми є фільтри низької частоти (ФНЧ), виконуючі попереднє і подальше видалення з частотного спектру додаткових гармонік сигналу, аналого-цифровий (АЦП) і цифро-аналоговий (ЦАП) перетворювачі сигналу і власне цифровий фільтр з кінцевою імпульсною характеристикою (КІХ). Амплітудно-частотна характеристика фільтру визначається значеннями коефіцієнтів фільтру С(к). Змінюючи кількість коефіцієнтів (довжину фільтру) і їх значення, можна отримати фільтр з будь-якою необхідною амплітудно-частотною характеристикою. Внесений шум (шуми квантування), залежить від частоти і розрядності АЦП і ЦАП, а також від точності обчислень.
Схема перетворення, виконуваного над послідовністю відліків сигналу, може бути також представлена графічно у вигляді структурної схеми цифрового фільтру (рис.5.2).

Рис.5.2. Структура цифрового фільтра (КІХ).
Прийняті позначення:
DL — блок затримки на 1 такт;
Mul — блок множення;
 — блок складання.
— блок складання.
Для ефективної реалізації алгоритмів цифрової фільтрації необхідна апаратна підтримка базових операцій ЦОС: множення з накопиченням (MAC— Multiplication Accumulation), модульної адресної арифметики, нормування результатів арифметичних операцій.
Іншим часто виконуваним перетворенням сигналу є дискретне перетворення Фур’є (пряме і обернене). Будь-який сигнал може бути представлений як в часовій області (сукупність графіків в координатах "час-амплітуда"), так і в частотній області (послідовність графіків в координатах "частота-амплітуда").
Залежно від використовуваних алгоритмів обробки може бути вибране або частотне, або часове представлення сигналу. Перетворення Фур’є дозволяє здійснювати перенесення сигналу з однієї форми представлення в іншу.
Існує велика різноманітність реалізацій дискретного перетворення Фур’є. У ряді алгоритмів використовуються прийоми, що дозволяють скоротити об'єм необхідних обчислень. Ці алгоритми відомі під загальною назвою "швидке перетворення Фур’є" (ШПФ).
Для зменшення числа операцій множення при виконанні ШПФ використовується метод, що отримав назву "проріджування за часом". Суть даного методу полягає в тому, що перетворення Фур’є по послідовності з N крапок може бути виражена через перетворення, виконані по підпослідовностях, кожна з яких має довжину N/2 крапок. Оскільки число множення пропорційне числу точок перетворення, то процедура двократного перетворення по N/2 крапкам з подальшим об'єднанням результатів виконується за менший час.
В даний час найчастіше методи цифрової обробки сигналів застосовуються в наступних областях:
− Обробка звукових сигналів, включаючи аналіз, розпізнавання і синтез мови, компресію звуку при передачі по каналах зв'язку. Частотний діапазон звукового сигналу складає 50Гц – 4КГц, тому з урахуванням теореми Котельникова частоту дискретизації досить вибрати рівною 8КГц. В більшості випадків досить мати формат даних з фіксованою точкою і довжиною 16 розрядів. Алгоритми обробки звуку включають: цифрову фільтрацію, спектральний аналіз (обчислення швидкого перетворення Фур’є ШПФ або дискретного перетворення Фур’є ДПФ), кореляційний аналіз. Такі алгоритми реалізуються над блоками даних завдовжки 128-256 вибірок. З урахуванням вищевикладеного продуктивність технічних засобів обробки може досягти 10 5 –10 6 множень/с.
− Обробка відеозображень покращує їх якість; компресія, декомпресія відеосигналів при передачі їх по каналах зв'язку, записі на CD-диски; розпізнавання образів. Розміри оброблюваних зображень великі і складають 640х480 або 1024х1024 пікселів, розрядність даних при цьому невелика – 8 біт. При обробці зображень алгоритми цифрової фільтрації, ШПФ є двовимірними. Продуктивність технічних засобів в цьому випадку оцінюється 10 9 – 10 12 оп/с, що вимагає використання паралельно-конвеєрної обробки.
− Обробка сигналів радіолокацій, що включає пошук і виявлення об'єктів, визначення координат, динамічних параметрів об'єктів і їх класифікацію. Розрядність вхідних даних і в цьому випадку невелика – до 8 біт, швидкодія технічних засобів – 10 8 – 10 9 мн/с.
− Обробка гідролокаційних сигналів включає ті ж операції, що і при обробці радіолокаційних сигналів, проте з урахуванням низькочастотного характеру гідроакустичних сигналів продуктивність технічних засобів нижче і складає 10 3 – 10 6 мн/с.
Алгоритми цифрової обробки повинні виконуватися в режимі реального часу. Логічно, що їх реалізація вимагає додаткових засобів для досягнення максимально можливої продуктивності сигнальних процесорів.
Для прискорення арифметичних обчислень в DSP використовуються декілька арифметично-логічних пристроїв, що працюють паралельно, які разом з особливою організацією внутрішньої пам'яті кристала дозволяють за один такт реалізувати операцію множення з підсумовуванням (накопиченням) - МАС. Така складна операція, як індексація масивів даних вирішена в DSP шляхом виділення в окремий блок підсистеми генерації адрес. Практично у всіх сигнальних процесорах генерація адрес не віднімає машинного часу і не вимагає припинення виконання основних операцій. Підвищені вимоги до швидкостей обміну із зовнішніми пристроями задовольняються за рахунок введення в схему високошвидкісних послідовних каналів вводу/виводу як синхронних, так і асинхронних.
Необхідність включення в систему команд однотактних інструкцій МАС привела до необхідності використання декількох адресних шин замість фон-Неймановської Гарвардської архітектури. Для реалізації справжньої Гарвардської архітектури потрібне введення двох шин адреси і двох шин даних, що при 32-розрядному мікропроцесорі привело б до необхідності використання 128 виводів – це дорого і незручно. Тому при розробці архітектури DSP була використана внутрішня Гарвардська і зовнішня архітектура фон-Неймановськая. У сигнальних процесорах на відміну від універсальних МП шина пам'яті працює на вищій (зазвичай в 4 рази) частоті, ніж процесорна тактова частота, що дозволяє за один такт процесора виконати декілька звернень до пам'яті.
Сучасні сигнальні процесори з успіхом вирішують як завдання розпізнавання і синтезу мови, обробки зображень в реальному часі, швидкого пошуку в базах даних, так і завдання побудови могутніх 3D-акселераторов.
Одним з перших сигнальних процесорів є і2920 компанії Intel, який був випущений в 1975 році. Особливістю цього процесора було використання на кристалі цифрового процесора, DAC і ADC (АЦП і ЦАП).
В даний час найбільше розповсюдження мають DSP наступних компаній: Texas Instruments, Analog Devices, Motorola.
Перший сигнальний процесор TMS320с1х компанія Texas Instruments випустила в 1982 році. Потім були випущені DSP більше 5 поколінь. Сигнальні процесори TMS320схх розділяють на 2 класи: процесори для обробки цілочисельних даних і процесори для обробки даних з плаваючою точкою (рис. 5.3)
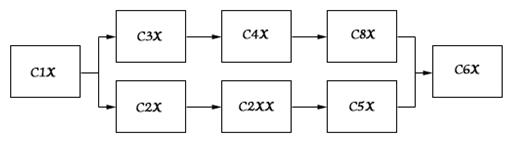
Рис. 5.3. Покоління сигнальних процесорів ТMS
Дата добавления: 2015-10-28; просмотров: 271 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Характеристика чипсетів | | | Сигнальні процесори TMS320C2XX І 320С54Х |