Читайте также:
|
При создании защищенных автоматизированных систем, рассмотрение ущерба как случайной величины довольно распространено. Причем описание принято осуществлять с использованием различных законов распределения, среди которых наибольшее популярностью пользуются регулярные законы. В данном классе существенное практическое применение нашло экспоненциальное (x>0) семейство: экспоненциальный и логнормальный законы; гамма-распределение; распределение Эрланга, Вейбула и Релея.
Рассмотрим это семейство в контексте построения риск-моделей атакуемых систем, имея ввиду следующие обозначения:
 – плотность вероятности наступления ущерба u;
– плотность вероятности наступления ущерба u;
 – k-ый начальный момент
– k-ый начальный момент  ;
;
 =u
=u  – риск наступления ущерба
– риск наступления ущерба 
Будем исходить из того, что на основе статистики определен закон распределения , т.е. выдвинута и доказана гипотеза (скажем, с помощью критериев Пирсона или Колмогорова), определены параметры , соответствующие статданным. Когда оценка рисков компонентов распределенной системы осуществлена, т.е. известны законы распределения риска и найдены его параметры для каждого компонента, представляется возможность рассчитать риск системы в целом. При этом, будем исходить из того, что ущербы, возникающие в ее компонентах при отказах и атаках на них слабо коррелированны между собой. Тогда ожидаемый общий ущерб системы можно найти как сумму ущербов в отдельных ее компонентах. Причем это допустимо не только для детерминированных, но и для случайных величин. С другой стороны относительная независимость этих параметров открывает перспективу соответствующих вероятностных оценок, рассматривая вероятность наступления общего ущерба как произведение вероятностей возникновения ущербов в компонентах системы. В этой связи может быть предложено следующее выражение оценки риска
где:  – мера ущерба в i-ой компоненте;
– мера ущерба в i-ой компоненте;
 плотность вероятности наступления ущерба
плотность вероятности наступления ущерба 
n – количество компонентов системы.
В случае использования экспоненциального семейства распределений последнее выражение примет вид
где  и
и  – функции ущерба i-ого компонента, определенные на основе соответствующего типа регулярного распределения экспоненциального семейства.
– функции ущерба i-ого компонента, определенные на основе соответствующего типа регулярного распределения экспоненциального семейства.
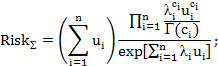
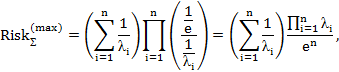
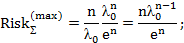
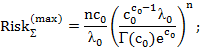
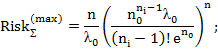
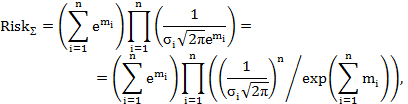
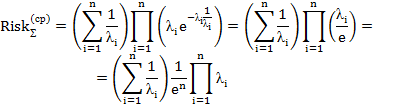
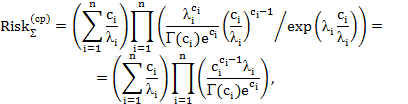
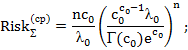
Данное выражение может быть конкретизировано, если законы распределения для ущербов в компонентах однотипны (имеют общие выражения) и отличаются друг от друга лишь параметрически. Такое в принципе возможно при однотипности компонентов, различающихся только настройкой на свою задачу. В этом случае, к примеру, для экспоненциального распределения имеем выражение для общего риска системы
где  – параметр распределения плотности вероятности наступления ущерба в i-ой компоненте.
– параметр распределения плотности вероятности наступления ущерба в i-ой компоненте.
По аналогии можно записать выражение общего риска системы при различных распределениях:
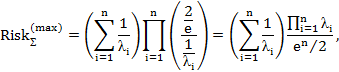
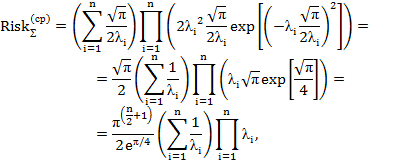
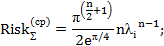
– для распределения Релея
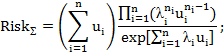
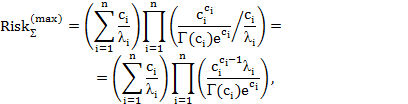
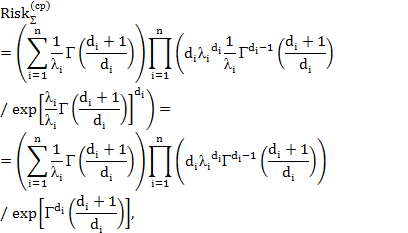
– для гамма-распределения
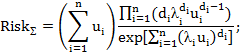
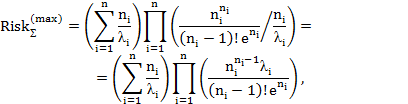
– для распределения Эрланга
для распределения Вейбулла
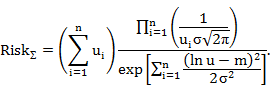
– для логнормального распределения
Для полученных выражений остается открытым вопрос о том, какие значения следует принимать во внимание. Здесь возможны по крайней мере два варианта: пиковая и средняя оценка.
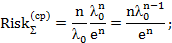
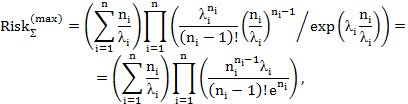
При пиковой оценке используются координаты максимума риска ( ) и общее выражение будет выглядеть следующим образом
) и общее выражение будет выглядеть следующим образом

где  – значение максимума риска в i-ой компоненте системы;
– значение максимума риска в i-ой компоненте системы;
 – значение ущерба, при котором имеет место быть пик риска в i–ой компоненте системы, т.е. мода риска.
– значение ущерба, при котором имеет место быть пик риска в i–ой компоненте системы, т.е. мода риска.
Для различных типов экспоненциального семейства регулярных распределений последнее выражение можно переписать в следующем виде:
при  ,
,
– для распределения Релея
при ,
– для Гамма распределения
при  ,
,
– для распределения Эрланга
при  ,
,
для распределения Вейбулла

при  ,
,

– для логнормального распределения
при  ,
,

Для удобства полученные выражения сведены в табл. 2.12.
Таблица 2.12
Аналитические выражения для расчета общего риска при пиковых оценках риска в компонентах
| Вид используемого закона распределения | Аналитическое выражение для расчета общего риска при пиковых оценках риска в компонентах |
| Экспоненциальный | 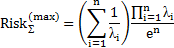
|
| Релея | 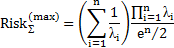
|
| Гамма | 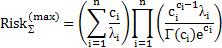
|
| Эрланга | 
|
| Вейбулла |
|
| Логнормальный | 
|
Алгоритм расчета общего риска в данном случае должен предусматривать прежде всего ввод данных о виде и параметрах распределений плотности вероятности наступления ущерба в каждой из компонент распределенной системы. Далее необходимо определить (в зависимости от вида распределения) координаты пика для всех компонентов системы. Полученные данные в результате следует использовать для расчета общего риска. Блок-схема данного алгоритма представлена на рис. 2.5.
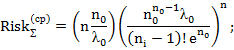
При использовании усредненных оценок в компонентах общий риск системы можно рассчитать с помощью выражения

В случае однотипных распределений плотности вероятности наступления ущерба в компонентах последнее выражение может быть конкретизировано:
– для экспоненциального распределения
при ,
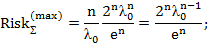
– для распределения Релея
при ,
– для гамма-распределения
при ,
– для распределения Эрланга
при ,
для распределения Вейбулла
при ,

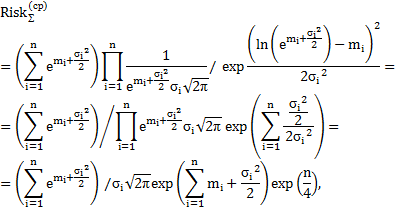
– для логнормального распределения
при ,

| Начало |
| Конец |
| Расчет координат пикового ущерба i- ой компоненты системы |
| Расчет общего риска системы с помощью выражения (2.2) |
| i=n |
| i=i+1 |
| Рис. 2.5. Блок-схема алгоритма расчета общего риска системы на основе пиковых оценок риска в ее компонентах |
| Ввод данных о виде и параметрах распределения плотности вероятности наступления ущерба для i -го компонента системы |
Таблица 5.13.
Аналитические выражения для расчета общего риска при усредненных оценках риска в компонентах
| Вид используемого закона распределения | Аналитическое выражение для расчета общего риска при усредненных оценках риска в компонентах |
| Экспоненциальный | 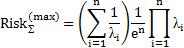
|
| Релея | 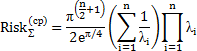
|
| Гамма | 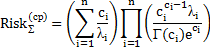
|
| Эрланга | 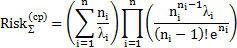
|
| Вейбулла | 

|
| Нормальный | 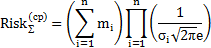
|
| Логнормальный | 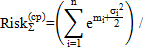
|
Алгоритм расчета общего риска системы при усредненных оценках риска в ее компонентах прежде всего включает ввод данных о виде параметрах распределения плотности вероятности наступления ущерба в компоненте. Далее находятся координаты среднего значения для ущерба в данной компоненте. Цикл с перебором по всем имеющимся в системе компонентам завершается расчетом по выражению (2.6). Блок-схема данного алгоритма изображена на рис. 2.6.
Предложенные таблицы 2.12 и 2.13 могут упростить расчет общего риска распределенной системы с помощью алгоритмов (рис. 2.5 и 2.6).
| Начало |
| Ввод данных о виде и параметрах распределения плотности вероятности наступления ущерба для i -го компонента системы |
| Расчет координат усредненного ущерба i- ой компоненты системы |
| i=i+1 |
Рис. 2.6. Блок-схема алгоритма расчета общего риска системы на основе усредненных оценок риска в ее компонентах
| Рис. 2.6. Блок-схема алгоритма расчета общего риска системы на основе усредненных оценок риска в ее компонентах (продолжение) |
| Конец |
| Расчет общего риска системы с помощью выражения (2.6) |
| i=n |
Дата добавления: 2015-10-26; просмотров: 230 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Алгоритмическое обеспечение риск-анализа систем в диапазоне ущербов | | | Методология оценки эффективности систем в условиях атак |