Читайте также:
|
Для математичного опису випадкових сигналів використовують поняття випадкового процесу, який можна визначити як сімейство випадкових змінних  , які залежать від параметра t. Цей параметр може приймати як дискретні значення, так і бути неперервним. В першому випадку
, які залежать від параметра t. Цей параметр може приймати як дискретні значення, так і бути неперервним. В першому випадку  , де Z множина цілих чисел і
, де Z множина цілих чисел і  , h – період (час) квантування. Якщо t неперервна величина, то
, h – період (час) квантування. Якщо t неперервна величина, то  або
або  .
.
Якщо Т – множина дискретних значень  , то випадковий процес називається процесом з дискретним часом. У тому випадку, коли t – неперервна величина, то маємо процес з неперервним часом.
, то випадковий процес називається процесом з дискретним часом. У тому випадку, коли t – неперервна величина, то маємо процес з неперервним часом.
В процесі спостереження за системою завжди отримують певну функцію часу  , яка називається реалізацією процесу або вибірковою функцією.
, яка називається реалізацією процесу або вибірковою функцією.
Серед усіх типів випадкових процесів у теорії керування особливе місце займають стаціонарні випадкові процеси.
Випадкові процеси  називаються стаціонарними, якщо розподіл
називаються стаціонарними, якщо розподіл  ,
,  , …,
, …,  тотожно дорівнює розподілу
тотожно дорівнює розподілу  ,
,  ,…,
,…,  для всіх значень
для всіх значень  . Якщо рівні тільки перші і другі моменти розподілу (математичне сподівання і дисперсія), то процес носить назву слабо стаціонарного.
. Якщо рівні тільки перші і другі моменти розподілу (математичне сподівання і дисперсія), то процес носить назву слабо стаціонарного.
Важливими характеристиками стаціонарного процесу є математичне сподівання та дисперсія.
Із визначення стаціонарного процесу випливає, що розподіл густини ймовірності  однаковий для всіх значень t і може бути записане як
однаковий для всіх значень t і може бути записане як  , тобто стаціонарний процес має постійне математичне сподівання
, тобто стаціонарний процес має постійне математичне сподівання
 (6.1)
(6.1)
і постійну дисперсію
 . (6.2)
. (6.2)
Якщо спостереження за випадковим процесом ведуться у дискретні моменти часу  , то
, то
 (6.3)
(6.3)
і
 . (6.4)
. (6.4)
При реалізації випадкового процесу завжди мають справу з кінцевим проміжним часу спостережень, тому за формулами (8.4) і (8.5) отримують не точні значення величин m і  , а їх оцінки
, а їх оцінки  і
і  .
.
Математичне сподівання і дисперсія випадкового процесу є точковими його характеристиками і мають зміст середнього значення та відхилення відносно m.
Для характеристики структури випадкового стаціонарного процесу використовують коваряційні функції
 . (6.5)
. (6.5)
Нормоване значення  носить назву автокореляційної функції випадкового процесу
носить назву автокореляційної функції випадкового процесу
 . (6.6)
. (6.6)
Для n =0 із формули (8.6) випливає, що  , тому
, тому  .
.
Нехай для значень  0, 1, 2, …,
0, 1, 2, …,  за формулою (8.7) обчислені величини
за формулою (8.7) обчислені величини  ,
,  ,…,
,…,  , тоді можна утворити матрицю
, тоді можна утворити матрицю 
 , (6.7)
, (6.7)
Матриця (6.7) називається автокореляційною матрицею.
Для стаціонарного випадкового процесу матриця симетрична і додатно визначена. Додатна визначеність матриці означає, що визначник і всі головні мінори матриці додатні.
Із формули (6.6) випливає, що автокореляційна функція безрозмірна. Так як  , то знання автокореляційної функції еквівалентно знанню коваріаційної функції і навпаки.
, то знання автокореляційної функції еквівалентно знанню коваріаційної функції і навпаки.
Формула (6.6) дає можливість визначити автокореляційну функцію стаціонарного випадкового процесу , який спостерігається нескінченно довго. На практиці завжди маємо справу з кінцевою часовою послідовністю  , ,…,
, ,…,  за якою можна знайти тільки оцінки автокореляцій.
за якою можна знайти тільки оцінки автокореляцій.
 (6.8)
(6.8)
де
 , (6.9)
, (6.9)
n =0,1,…,s – оцінка автоковаріації.
Для отримання змістовної оцінки автокореляції N повинно бути не менше 50, а  .
.
Якщо відома коваріаційна функція
 , (6.10)
, (6.10)
де  - часовий зсув; то у відповідність до неї можна поставити функцію спектральної щільності
- часовий зсув; то у відповідність до неї можна поставити функцію спектральної щільності
 . (6.11)
. (6.11)
Задача знаходження коваріаційної функції (6.11) є двоякою задачею, оскільки за відомим значенням  можна знайти
можна знайти
 . (6.12)
. (6.12)
Функція спектральної щільності є характеристикою розподілу потужності і дисперсії сигналу за частотою.
Програма для побудови кореляційних функцій і спектральних густин виконана в середовищі ПП Matlab і наведена в Додатку Г. Результати досліджень, а саме автокореляційна функція вхідного і вихідного сигналів, взаємокореляційна функція, спектральна густина вхідного і вихідного сигналів наведені нижче (рис.6.1 - 6.24).

Рисунок 6.1 – Графік формування вхідного і вихідного сигналу для W11

Рисунок 6.2 – Автокореляційна функція вхідного сигналу для W11

Рисунок 6.3 – Взаємокореляційна функція сигналу для W11

Рисунок 6.4 – Автокореляційна функція вихідного сигналу для W11

Рисунок 6.5 – Спектральна густина вхідного сигналу для W11

Рисунок 6.6 – Спектральна густина вихідного сигналу для W11

Рисунок 6.7 – Графік формування вхідного і вихідного сигналу для W12

Рисунок 6.8 – Автокореляційна функція вхідного сигналу для W12

Рисунок 6.9 – Взаємокореляційна функція сигналу для W12

Рисунок 6.10 – Автокореляційна функція вихідного сигналу для W12

Рисунок 6.11 – Спектральна густина вхідного сигналу для W12

Рисунок 6.12 – Спектральна густина вихідного сигналу для W12

Рисунок 6.13 – Графік формування вхідного і вихідного сигналу для W21
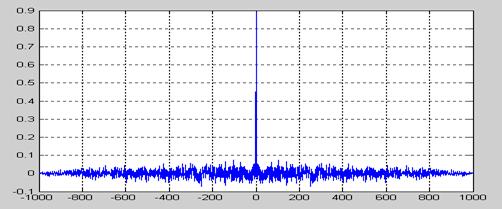
Рисунок 6.14 – Автокореляційна функція вхідного сигналу для W21

Рисунок 6.15 – Взаємокореляційна функція сигналу для W21

Рисунок 6.16 – Автокореляційна функція вихідного сигналу для W21

Рисунок 6.17 – Спектральна густина вхідного сигналу для W21
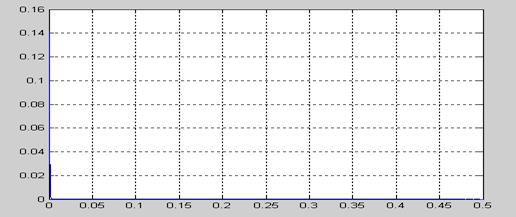
Рисунок 6.18 – Спектральна густина вихідного сигналу для W21

Рисунок 6.19 – Графік формування вхідного і вихідного сигналу для W22

Рисунок 6.20 – Автокореляційна функція вхідного сигналу для W22

Рисунок 6.21 – Взаємокореляційна функція сигналу для W22

Рисунок 6.22 – Автокореляційна функція вихідного сигналу для W22

Рисунок 6.23 – Спектральна густина вхідного сигналу для W22

Рисунок 6.24 – Спектральна густина вихідного сигналу для W22
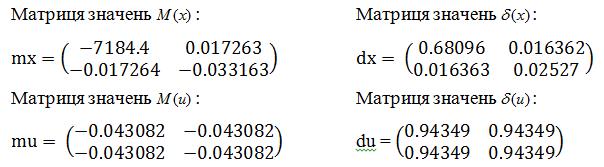
Одним з результатів побудови кореляційної функції та спектральної густини є отримання матриць значень математичного сподівання та середнього квадратичного відхилення для для досліджуваного КО (рис.6.25).
|
Рисунок 6.25 – Матриці значень математичного сподівання та середнього квадратичного відхилення для для досліджуваного КО
ВИСНОВОК
Під час розробки курсової роботи мені довелося зіткнутись з такими завданнями, як складання математичної моделі, розрахунок її параметрів, лінеаризація, а також обчислення лінеарезованої моделі за допомогою аналітичних і числових методів.
В результаті проведення обчислень за допомогою сучасної обчислювальної техніки та програмного забезпечення Mathcad і MatLab на основі дослідних даних ми можемо сказати що під впливом масових витрат, керуючої дії регулюючого пристрою рівні рідини в першій і другій посудинах змінюються на деякому проміжку часу.
Під час знаходження розв’язку лінеаризованої математичної моделі аналітичними і числовим методами ми, скориставшись даними параметрів гідравлічного об’єкта, які були нами обчислені в попередніх пунктах, отримали графік залежності зміни рівня рідини в посудинах від часу з якого випливає, що отримані результати аналітичного і числового методів практично співпадають.
В останніх двох розділах я виконав побудову часових і частотних характеристих, а також кореляційної функції, спектральної густини та їх числових даних для досліджуваного КО.
Дата добавления: 2015-10-24; просмотров: 444 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ПОБУДОВА ЧАСОВИХ І ЧАСТОТНИХ ХАРАКТЕРИСТИК ОБ’ЄКТА | | | Типовые модели объектов управления |