|
Читайте также: |
Тема лекции: 1. Особенности нелинейных систем и нелинейные характери- стики
Особенности нелинейных систем
Нелинейной называется система, для которой не выполняется принцип суперпозиции [1]. Поведение такой системы описывается нелинейными диффе- ренциальными уравнениями. На практике наиболее часто встречаются системы с безынерционными нелинейными звеньями. Оператором преобразования тако- го звена является функциональная зависимость между входной и выходной ве- личинами, называемая статической характеристикой звена.
Нелинейным АСР присущи принципиально новые свойства в динамике, которые отсутствуют у линейных АСР. Обратим внимание на некоторые из них.
Во-первых, к нелинейным АСР, как указывалось выше, неприменим принцип суперпозиции. Во - вторых, качество переходных процессов в нели- нейных АСР зависит от величины возмущения. На рисунок 1.1 иллюстрируется характер переходных процессов в одной и той же нелинейной системе при раз- личных возмущениях.
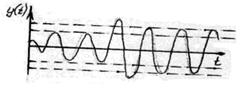
Отличительной особенностью нелинейных систем является возможность возникновения в них автоколебаний. На рисунок 1.2 а показан
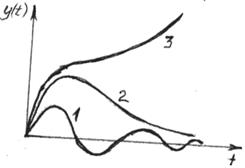
Рисунок 1.1. Переходные процессы при различных возмущениях:
1- колебательная устойчивость; 2- апериодическая устойчивость; 3 - неустойчивый процесс
случай, когда при любых возмущениях в системе устанавливаются незатухаю- щие колебания с постоянной амплитуды. Такие устойчивые колебания с посто- янной амплитудой называются автоколебаниями. Автоколебания представляют собой новый вид установившегося режима, возможного при отсутствии внеш- них возмущений и характерного только для нелинейных систем. На рисунок 1.2 б показан случай, когда амплитуда установившихся колебаний зависит от сте- пени возмущения. На рисунок 1.2 в показан случай, когда при малых возмуще- ниях автоколебания устойчивые, а при больших возмущениях-неустойчивые.
Таким образом, при указанных особенностях нелинейных систем необхо- димо при рассмотрении устойчивости оговаривать начальные условия и внеш- ние воздействия. Поэтому для нелинейных систем надо говорить не об устой-
чивости вообще, а об устойчивости определенного их режима. В связи с этим при изучении нелинейных систем употребляют понятия устойчивости в малом, в большом и в целом.
Устойчивость в малом – это устойчивость при бесконечно малых откло- нениях от исходного режима. Устойчивость при конечных отклонениях, воз- можных в данной системе по условиям ее работы. Устойчивость в целом – это устойчивость при отсутствии каких-либо ограничений на отклонения.
Нелинейные характеристики
Большинство встречающихся на практике нелинейных статических ха- рактеристик

а)
б)

в)
Рисунок 1.2. Различные виды автоколебаний в нелинейных системах
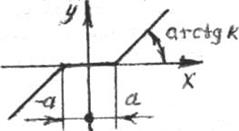
Рисунок 1.3. Характеристика типа «нечувствительность»
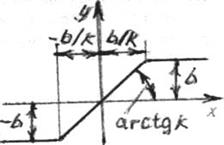
Рисунок 1.4. Характеристика типа «ограничение»
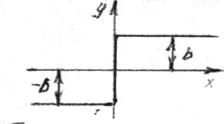
Рисунок 1.5. Идеальная релейная характеристика
y = f (x)
может быть сведено к типовым, рассмотренным ниже, и разделено на
две группы: однозначные и неоднозначные. Однозначной статической харак- теристикой называется такая, вид которой не зависит от направления измене- ния входной величины х нелинейного звена. Вид неоднозначной статической характеристики зависит от направления изменения входной величины х: при
увеличении
x [ dx / dt)0]
выходная величина у изменяется по одной зависимости
от входной, при уменьшении
x [ dx / dt <0] -по другой.
|
y = a 0
x n + a x n 1+... + a
при
b < x < c, (1.1)
где
ai -постоянные коэффициенты, b и
c (b < c)-диапазон изменения х.
Разрывные характеристики могут быть сведены к различным комбинаци- ям из четырех приведенных ниже типовых характеристик:

Рисунок 1.6. Релейная характеристика с зоной нечувствительности

Рисунок 1.7. Характеристика типа «люфт»
Рисунок 1.8. Двухпозиционная релейная характеристика с зоной нечувстви- тельности

Рисунок 1.9. Трехпозиционная релейная характеристика с зонами нечувстви- тельности
нечувствительность (рисунок 1.3):
y = 0
при
х < а; l

 у = k(x - a)
у = k(x - a)
|
(1.2)
у = k(x - a)
при х < а; 1
ограничение (рисунок 1.4):
y = kx
при
х < b/k; l

 1
1
y = b
при х > b/k;
(1.3)
y = -b
при х < -b/k;1
|
y = b y = -b
при х > 0;l
|
(1.4)
релейная с зоной нечувствительности (рисунок 1.6):
y = 0
при
х < а; l

 1
1
у = b
у = b
при х > а;
|
(1.5)
Неоднозначные нелинейные статические характеристики. Наиболее распространенные типовые разрывные характеристики приведены ниже:
л юфт (рисунок 1.7):
у = k(x - a)
у = k(x + a)
при dx / dt > 0; l
 1
1
(1.6)
dy / dx = 0
при y/k x < a; J
двухпозиционная релейная характеристика с зонами нечувствительно- сти (рисунок 1.8):
y = b y = -b
y = b
при х > а;l l
если dx/dt > 0; 1
при х < а;J 1
при х > а; l
(1.7)
y = -b
при х < а;J J
т рехпозиционная релейная характеристика с зонами нечувствительно- сти (рисунок 1.9):
y = b
при x > a 2; l l
1 1
y = -b
при х < -а1;
если dx/dt > 0; 1
y = 0
при - а1
< х < а 1 11
|
(1.8)
y = b
при
x > a 1; l 1
y = b
при х < -а;
1 если dx/dt < 0.1
1 1
y = 0
при - а
< х < а, 1 1J
2 1 J
Основная литература: 4 [599-610].
Дополнительная литература: 1 [365-414].
Контрольные вопросы:
1. Нелинейные системы и элементы.
2. Звено релейного типа.
3. Звено с кусочно-линейной характеристикой.
4. Класс нелинейных систем.
5. Какие системы автоматического регулирования называются нелинейными?
6. Какие виды нелинейных элементов Вам известны?
Конспект лекции № 2
Тема лекции: 2. Линеаризация нелинейных характеристик путем разложе- ния в ряд
Разработанные в настоящее время точные методы исследования нелиней- ных АСР практически могут применяться для систем, описываемых нелиней- ными дифференциальными уравнениями невысокого порядка, и часто сложны для инженерного использования. Поэтому в инженерной практике большое применение находят приближенные методы, основанные на замене действи- тельных зависимостей между входной и выходной переменными приближен- ными линейными. При этом линеаризацию необходимо производить так, чтобы учесть хотя бы приближенно нелинейные свойства звеньев, т.е. чтобы для ли- неаризованных элементов не выполнялся принцип суперпозиции.
Линеаризация нелинейных характеристик путем разложения в ряд
состоит в замене характеристики
y = f (x)
приближенной линейной зависимо-
стью, определяемой двумя первыми членами разложения характеристики в ряд
Тейлора. Пусть характеристика
y = f (x)
дифференцируема и входной сигнал
x (t)
y =
мало отличается от некоторого среднего значения
|
x 0, тогда зависимость
y = f (x 0
)+ f
(x 0)(x x 0),
(2.1)
Замена нелинейной зависимости
y = f (x)
линейной (2.1) геометрически
представляет собой замену кривой
y = f (x), касательной к ней в точке
x 0.
Действующие в АСР внешние возмущения можно представить как ста-
ционарные случайные функции
x (t)
с математическим ожиданием mx
о
и центри-
рованной случайной составляющей
х (t):
(2.2)
В этом случае практически линеаризацию нелинейной характеристики целесообразно производить относительно центрированного входного случайно-
го сигнала
x (t), т.е. за центр разложения
x 0 в (2.1) взять математическое ожида-
входного сигнала
x (t). В результате получается
y (t) �
f (mx) + f
(mx) x (t)
(2.3)
|
о
тельно случайной составляющей
тельно математического ожидания неприменим.
x (t) входного сигнала и нелинейна относи-
mx, поэтому принцип суперпозиции здесь
Основная литература: 4 [600-620].
Дополнительная литература: 1 [365-414].
Контрольные вопросы:
1. Метод решения задачи, методом припасовывания.
2. Как определяется амплитуда найденных автоколебаний?
Конспект лекции № 3
Тема лекции: 3. Линеаризация нелинейных характеристик. Метод гармони- ческой линеаризации
В целом ряде практических задач приходится рассматривать воздействие на линейное звено гармонических колебаний
x (t) = Àsin wt
= Àsin;
= wt.
(3.1)
Выходной сигнал нелинейного звена также будет периодическим, но не гармоническим. В качестве примера на рисунок 3.1 приведены графики сигна-
лов
y (t) на выходе нелинейных звеньев с различными характеристиками.
Идея гармонической линеаризации состоит в том, что выходные перио-
дические колебания
y (t) разлагают в ряд Фурье и для дальнейших исследований
ограничиваются рассмотрением лишь первых гармоник

а) б)
Рисунок 3.1. Сигнал (а) на выходе нелинейного звена с характеристикой (б)
этого ряда. В этом случае нелинейная зависимость ется приближенной
y = f (x) =
f (Àsin) заменя-
y (t) = a 0+ a sin wt + b cos wt
= a 0+ q 1 x + q 2 x / w,
(3.1)
где
a = 1
0 2 ï
2 ï
 f f (Àsin) d;
f f (Àsin) d;
(3.2)
1 2 ï

(3.3)
1 2 ï

(3.4)
Коэффициенты
q 1 и
q 2называются гармоническими коэффициентами
усиления нелинейного звена, они зависят от характеристики нелинейного эле-
мента и от амплитуды А входного синусоидального сигнала, т.е.
q 1= q 1(À),
q 2= q 2(À). Для типовых нелинейных характеристик формулы для вычисления
q 1 (À) и
q 2(À) приведены в таблица 3.1. Для нечетных характеристик
a 0= 0,
для
однозначных характеристик нелинейные характеристики.
q 2(A) = 0. В дальнейшем рассматриваются нечетные
Выражение (2.1) при
a 0= 0 можно представить в виде
y (t) = c À sin(wt + 8),
(3.5)
где

0 = arctg (q 2/ q 1).
(3.6)
Часто удобно входной сигнал рассматривать в комплексной форме:
x (t) = À e jwt,
(3.7)
тогда первая гармоника выходного сигнала принимает вид
y (t) = c À e j (wt + 8).
(3.8)
Введем понятие комплексного гармонического коэффициента усиления нелинейного звена
|
W (À) = ce j8,
(3.9)
y (t) = WH (A) x (t).
(3.10)
Используя (3.6), WH (A)
можно представить в виде
WH (A) = q 1(A) + jq 2(A).
(3.11)
Коэффициент
WH (A)
не зависит от частоты входных колебаний, а зави-
сит от их амплитуды А, в этом в основном и состоит отличие нелинейного бе- зынерционного звена от линейного инерционного.
Таблица 3.1.
Коэффициенты гармонической линеаризации типовых нелинейных харак- теристик




|


 A 2
A 2









 2 b
2 b
1 a 2 +
1 a 1













 Основная литература: 4 [702-712].
Основная литература: 4 [702-712].
Дополнительная литература: 1 [301-322]; 2 [285-360].
Контрольные вопросы:
1. В чем сущность метода гармонической линеаризации?
2. Каковы ограничения применения метода гармонической линеаризации?
3. Что называется приближенной передаточной функцией и эквивалентным комплексным коэффициентом усиления нелинейного элемента?
4. Что называется комплексным коэффициентом усиления линейной части?
5. В каком порядке производится исследование нелинейной системы методом гармонической линеаризации?
Конспект лекции № 4
Тема лекции: 4. Линеаризация нелинейных характеристик статистическая линеаризация
Метод приближенной замены нелинейной характеристики эквивалент- ными в вероятностном смысле линейными зависимостями называется методом статистической линеаризации. В результате такой линеаризации нелинейная за-
висимость
y = f (x) заменяется приближенной
о
y (t) � k 0 mx + k 1 x (t),
(4.1)
где
mx = const -математическое ожидание стационарного случайного сигнала на
входе нелинейного элемента; x (t) -центрированная случайная составляющая
входного сигнала
x (t).
Предполагается, что выходной стационарный случайный сигнал может быть представлен в виде
y (t) = my + y (t),
(4.2)
где
my -математическое ожидание
y (t); y (t) -центрированная случайная состав-
ляющая
y (t).
Коэффициент
k 0= my / mx
(4.3)
называется статистическим коэффициентом усиления звена по математическо- му ожиданию.
Коэффициент
k 1= ± cr y / cr x
(4.4)
называется статистическим коэффициентом усиления нелинейного звена по
|
и cr 2-дисперсии
y (t) и
x (t).
|
истинной. В этом случае
Дата добавления: 2015-08-20; просмотров: 61 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Распределение рейтинговых процентов по видам контроля | | | Конспект лекции №1 2 страница |