Читайте также:
|
В начале восьмидесятых годов растущие требования к передаче информации между отдельными модулями в транспортном средстве привели к стремлению найти специальное решения для обеспечения данной связи. Ни одно из доступных в то время решений (последовательная линия, специальная линия для каждой пары модулей) не оказалось приемлемым для автомобильной промышленности. Это привело группу разработчиков общества Robert Bosh, GmbH к новому решению, известному в настоящее время под названием CAN (Controller Area Network). Это новое решение позволяет взаимно соединять десятки - сотни самостоятельных модулей. Связь посредством CAN основана на передаче групп данных, образующих кадры (frames). Каждый кадр содержит идентификатор (ID), область данных (Data Area - DA) и биты проверки на четность (CRC).
Полезные данные, передаваемые в рамках кадра, закодированы и содержат 64 бита (8 байтов). Идентификация служит для разрешения отдельных кадров на шине данных и для определения их относительных приоритетов. Если оба способа идентификации перекрываются, то могут возникать проблемы. Если действительные приоритеты кадров не учитываются, то связь становится неэффективной и существует опасность сбоя.
Основной принцип связи CAN показан на рисунке. Одна из основных предпосылок связи CAN заключается в том, что в случае коллизии контроллер использует кадр с высшим приоритетом. Внутренняя очередь сообщений в контроллере должна быть такой, чтобы в случае накопления большего количества сообщений, предназначенных для передачи, они передавались в соответствии с их приоритетом. Однако такая функция требует более одного буфера передачи, который должен быть снова использован (заполнен) после окончания предшествующего процесса. Идеальный контроллер CAN должен содержать не менее трех буферных ЗУ, вопрос коллизии которых решается с помощью приоритета.
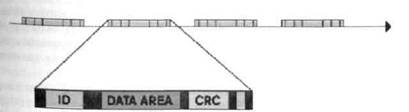
Кадр CAN шины
Предшествующие проекты шины CAN могли быть в некоторой степени несистемными, так как емкость CAN была вполне достаточной. Используемый подход заключался в передаче всех кадров на шину и последующей доработке нужной синхронизации в рамках наладки системы. Такой способ, однако, применим только при малой степени использования шины (около 10%), когда вероятность коллизии (и последующей задержки связи) мала и вероятность двух последующих друг за другом коллизий пренебрежимо мала. Для проверки оптимального использования шины необходимо осуществить полный анализ синхронизации кадров на шине.
Дата добавления: 2015-10-13; просмотров: 100 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ЭЛЕКТРОННЫЕ ДИСПЛЕИ ДЛЯ DSS | | | Связь MOST |