Читайте также:
|
| Позначення | Положення механізму | |||||||||||

| 70,70 | 64,00 | 43,50 | 19,00 | 6,50 | 32,00 | 55,30 | 68,00 | 67,00 | 40,00 | 15,00 | 53,00 |

| 1,60 | 0,96 | 0,65 | 0,28 | 0,10 | 0,48 | 0,83 | 1,02 | 1,01 | 0,60 | 0,22 | 0,80 |

| 0,00 | 31,50 | 56,50 | 68,00 | 70,00 | 63,00 | 44,00 | 17,50 | 24,50 | 58,50 | 68,50 | 40,50 |

| 0,00 | 0,47 | 0,85 | 1,02 | 1,05 | 0,95 | 0,66 | 0,26 | 0,37 | 0,88 | 1,03 | 0,61 |

| 70,70 | 69,00 | 58,50 | 46,50 | 42,50 | 51,50 | 64,00 | 70,00 | 71,00 | 78,50 | 93,00 | 76,00 |

| 1,06 | 1,03 | 0,88 | 0,70 | 0,64 | 0,77 | 0,96 | 1,05 | 1,07 | 1,12 | 1,39 | 1,14 |

| 0,00 | 26,50 | 40,00 | 41,50 | 41,50 | 40,00 | 33,50 | 16,00 | 25,00 | 76,00 | 92,00 | 51,00 |

| 0,00 | 0,40 | 0,60 | 0,62 | 0,62 | 0,60 | 0,50 | 0,24 | 0,37 | 1,14 | 1,38 | 0,76 |

| 70,70 | 55,00 | 34,00 | 14,00 | 5,30 | 21,00 | 45,50 | 62,50 | 76,00 | 54,50 | 23,00 | 75,00 |

| 1,06 | 0,83 | 0,51 | 0,21 | 0,08 | 0,32 | 0,68 | 0,94 | 1,14 | 0,82 | 0,35 | 1,12 |

| 70,70 | 63,50 | 43,50 | 22,00 | 12,50 | 33,00 | 55,00 | 68,50 | 68,00 | 56,00 | 61,00 | 62,50 |

| 1,06 | 0,95 | 0,65 | 0,33 | 0,19 | 0,49 | 0,83 | 1,03 | 1,02 | 0,84 | 0,92 | 0,94 |

| 0,00 | 1,41 | 2,23 | 2,50 | 2,54 | 2,38 | 1,83 | 0,85 | 1,48 | 4,37 | 5,44 | 2,73 |
2.3. Побудова планів прискорень для двох положень механізму
Визначимо прискорення точки А. Через те, що кривошип обертається рівномірно, точка А має тільки нормальне прискорення, яке напрямлене вздовж ланки О1А до центра обертання. Значення цього прискорення:

Приймемо довжину відрізка  , який зображає вектор прискорення точки А таким, що дорівнює 143,5 мм. Тоді масштаб плану прискорень:
, який зображає вектор прискорення точки А таким, що дорівнює 143,5 мм. Тоді масштаб плану прискорень:
 .
.
З довільної точки  , яка прийнята за полюс плану прискорень, відкладаємо паралельно ланці
, яка прийнята за полюс плану прискорень, відкладаємо паралельно ланці  вектор
вектор  (див. аркуш 1 (додаток А) або рис. 2.2).
(див. аркуш 1 (додаток А) або рис. 2.2).
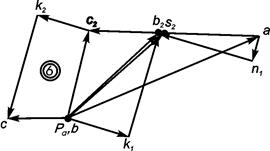
Рис. 2.2. План прискорень для шостого положення механізму
Прискорення точки В дорівнює нулю, отже, точка В збігається з полюсом плану прискорень.
Розглянемо рух точки  з кулісою АС і каменем 3 та складемо векторні рівняння:
з кулісою АС і каменем 3 та складемо векторні рівняння:

 (2.4)
(2.4)
де  – вектор нормального прискорення точки при обертанні ланки 2 відносно точки А, має напрям уздовж ланки до умовного центра обертання A;
– вектор нормального прискорення точки при обертанні ланки 2 відносно точки А, має напрям уздовж ланки до умовного центра обертання A;
 – вектор дотичного прискорення точки В2 при обертанні ланки 2 відносно точки A;
– вектор дотичного прискорення точки В2 при обертанні ланки 2 відносно точки A;
 – вектор коріолісового (поворотного) прискорення точки В 2 відносно точки В;
– вектор коріолісового (поворотного) прискорення точки В 2 відносно точки В;
 – вектор відносного (релятивного) прискорення точки В 2 відносно точки В.
– вектор відносного (релятивного) прискорення точки В 2 відносно точки В.
Напрям вектора визначається напрямом вектора відносної швидкості  , що повернений на 90° в бік обертання куліси (правило М.Є. Жуковського).
, що повернений на 90° в бік обертання куліси (правило М.Є. Жуковського).
Визначаємо значення нормального і коріолісового прискорень:
 ;
;
 .
.
Тоді відрізки, що зображають їх на плані прискорень:
 ;
;
 .
.
Згідно з рівнянням (2.4) будуємо план прискорень і знаходимо прискорення точки , а також невідомі складові і :
 ;
;
 ;
;
 ;
;
 .
.
Прискорення точки  , яка належить кулісі, визначаємо за теоремою подібності плану прискорень ланці, склавши пропорцію:
, яка належить кулісі, визначаємо за теоремою подібності плану прискорень ланці, склавши пропорцію:
 ,
,
звідки
 .
.
Відкладаючи відрізок  на продовженні відрізка
на продовженні відрізка  і, з’єднавши точку
і, з’єднавши точку  з полюсом , отримаємо величину і напрям вектора прискорення точки :
з полюсом , отримаємо величину і напрям вектора прискорення точки :
 .
.
Для визначення прискорення точки С, яка належить повзунам 4 і 5, складемо векторні рівняння:
 (2.5)
(2.5)
де  – вектор коріолісового прискорення точки С відносно точки , напрям якого знайдемо, повернувши вектор відносної швидкості
– вектор коріолісового прискорення точки С відносно точки , напрям якого знайдемо, повернувши вектор відносної швидкості  на 90° в бік обертання куліси;
на 90° в бік обертання куліси;
 – вектор відносного прискорення точки С відносно точки (має напрям уздовж куліси АВ);
– вектор відносного прискорення точки С відносно точки (має напрям уздовж куліси АВ);
 .
.
Значення коріолісового прискорення:
 ,
,
а довжина відрізка, який зображає його на плані прискорень:
 .
.
Згідно з рівнянням (2.5) від точки на плані прискорень відкладаємо в указаному напрямі відрізок  . Через точку
. Через точку  проводимо напрям вектора , а через полюс – напрям вектора
проводимо напрям вектора , а через полюс – напрям вектора  , який паралельний напрямній повзуна 5. Точку перетину цих напрямів позначимо с.
, який паралельний напрямній повзуна 5. Точку перетину цих напрямів позначимо с.
Вимірюємо відрізки:


Тоді


Знаючи положення центра мас S 2 на кулісі, за аналогією з планом швидкостей, знаходимо за правилом подібності точку s 2 на плані прискорень. З’єднавши отриману точку s 2 з полюсом плану прискорень, обчислюємо прискорення центра мас куліси:

Кутове прискорення кривошипа  , оскільки ця ланка обертається рівномірно. Значення кутового прискорення куліси:
, оскільки ця ланка обертається рівномірно. Значення кутового прискорення куліси:
 .
.
Для визначення напряму вектора  переносимо вектор у точку В. Розглядаємо рух ланки 2 відносно точки А. У нашому випадку вектор має напрям вліво, отже, напрямлене проти годинникової стрілки.
переносимо вектор у точку В. Розглядаємо рух ланки 2 відносно точки А. У нашому випадку вектор має напрям вліво, отже, напрямлене проти годинникової стрілки.
Плани прискорень в інших положеннях механізму будуються аналогічно. Отримані значення відрізків, які зображають вектори прискорень, та їх значення наведено у табл. 2.2.
Таблиця 2.2
Дата добавления: 2015-10-24; просмотров: 170 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Для дванадцяти положень механізму | | | Визначення прискорень різних точок і ланок механізму |