|
Читайте также: |
(2) при снижении с убранным газом на скорости не выше  с выпущенным шасси и закрылками в убранном (i) и в выпущенном (ii) положениях, при наиболее неблагоприятной центровке, утвержденной для посадки независимо от веса ВС.
с выпущенным шасси и закрылками в убранном (i) и в выпущенном (ii) положениях, при наиболее неблагоприятной центровке, утвержденной для посадки независимо от веса ВС.
(3) во время горизонтального полета при любой скорости в диапазоне от до  с убранными шасси и закрылками в диапазоне от до
с убранными шасси и закрылками в диапазоне от до  при выпущенном шасси.
при выпущенном шасси.  - максимальная эксплуатационная и максимальная скорость полета с выпущенным шасси.
- максимальная эксплуатационная и максимальная скорость полета с выпущенным шасси.
25.173. Продольная статическая устойчивость.
(а) Для достижения и выдерживания скоростей, ниже заданной балансировочной скорости, требуются тянущие усилия ( ), а для достижения и выдерживания скоростей выше заданной балансировочной – толкающие усилия (
), а для достижения и выдерживания скоростей выше заданной балансировочной – толкающие усилия ( ).
).
(в) скорость полета должна восстанавливаться в пределах 10% исходной балансировочной в условиях набора высоты, захода на посадку и посадки и в пределах 73,5% исходной балансировочной скорости в условиях крейсерского полета.
(с) среднее значение  должно быть не менее 0,5кгс/10
должно быть не менее 0,5кгс/10  .
.
(А) Допускается нулевой градиент  в диапазоне скоростей
в диапазоне скоростей  сигн. до
сигн. до  .
.
Лекция 5. 3. Боковое движение. Боковое движение исследуется обычно в зависимости от параметров опорного продольного движения: углов атаки и тангажа, угловой скорости  , скорости и высоты полета. Часто рассматривается сначала какой-либо опорный невозмущенный полет с заданным креном, углом скольжения или прямолинейный полет без крена и скольжения, а затем изучается характер изменения параметров бокового движения
, скорости и высоты полета. Часто рассматривается сначала какой-либо опорный невозмущенный полет с заданным креном, углом скольжения или прямолинейный полет без крена и скольжения, а затем изучается характер изменения параметров бокового движения  и т.п. в зависимости от разных факторов. Рассмотрим применяемые математические модели для аэродинамических сил и моментов в боковом движении.
и т.п. в зависимости от разных факторов. Рассмотрим применяемые математические модели для аэродинамических сил и моментов в боковом движении.
3.1. Аэродинамические моменты крены и рыскания
При ассиметричном обтекании ВС воздушным потоком относительно плоскости XOY из-за скольжения возникает аэродинамическая поперечная сила, складывается из сил, действующих на фюзеляж  , вертикальное оперение
, вертикальное оперение  и гондолы двигателей
и гондолы двигателей 
 (3.1)
(3.1)
где: 

соответствующие коэффициенты сил, площади и коэффициенты торможения потока около указанных элементов ВС. Коэффициент аэродинамической поперечной силы ВС при нейтральном положении руля направления ( )
)

 , (3.2)
, (3.2)
принимается  и при
и при  (скольжение на правое полукрыло)
(скольжение на правое полукрыло)  , т.е. поперечная сила направлена в сторону левого полукрыла. Так как мы будем рассматривать углы скольжения
, т.е. поперечная сила направлена в сторону левого полукрыла. Так как мы будем рассматривать углы скольжения  в пределах ±20°, то часто принимается
в пределах ±20°, то часто принимается  . При этом между поперечной силой
. При этом между поперечной силой  и боковой
и боковой  существует связь:
существует связь:

С учетом малости  получаем
получаем
 ,
,
или, когда значения Х невелики, то
 .
.
Так же как и для продольного движения можно суммировать все моменты, возникающие от отдельных частей ВС, предполагая неизменной его конфигурацию. В качестве опорного движения примем прямолинейное движение с неизменной скоростью, а боковое – в малой окрестности его с отклоненными рулем направления и элеронами, со скольжением и по линейной траектории ( ).
).
В этом случае коэффициенты моментов крена и рыскания записываются в следующем виде
 (3.3)
(3.3)
 , (3.4)
, (3.4)
где 

В основном работа двигателей приводит к поперечной силе  и моментов от нее
и моментов от нее  за счет косой обдувки воздухозаборников при скольжении.
за счет косой обдувки воздухозаборников при скольжении.  определяется так же как
определяется так же как  (см. разд. 2.2). Производные моментов можно оценить так же как и в продольном движении по приближенным формулам. Чаще всего эти значения определяются и даются в зависимости от скорости полета (или М), угла атаки.
(см. разд. 2.2). Производные моментов можно оценить так же как и в продольном движении по приближенным формулам. Чаще всего эти значения определяются и даются в зависимости от скорости полета (или М), угла атаки.
Рассмотрим здесь принятые обозначения, физическую сущность моментов, их определение. Величина  принимается при
принимается при  в прямолинейном горизонтальном полете и зависит от скорости и балансировочного угла атаки.
в прямолинейном горизонтальном полете и зависит от скорости и балансировочного угла атаки.
Момент  называют момент поперечной статической устойчивости, а
называют момент поперечной статической устойчивости, а  - характеризует степень поперечной статической устойчивости. Все производные коэффициентов моментов являются функциями
- характеризует степень поперечной статической устойчивости. Все производные коэффициентов моментов являются функциями  и V(M) и в частности
и V(M) и в частности  - (при отрицательной ) будет играть роль «восстанавливающего» момента. Так, например при крене на правое полукрыло будет возникать скольжение в сторону опускающегося правого полукрыла, т.к. результирующая сила
- (при отрицательной ) будет играть роль «восстанавливающего» момента. Так, например при крене на правое полукрыло будет возникать скольжение в сторону опускающегося правого полукрыла, т.к. результирующая сила  играет роль центростремительной (см.рис. 20) неуравновешенной силы, искривляющей траекторию в сторону опущенного полукрыла и после суммирования скорости невозмущенного потока и скорости потока, набегающего на правое полукрыло, видно, что угол скольжения будет положительным.
играет роль центростремительной (см.рис. 20) неуравновешенной силы, искривляющей траекторию в сторону опущенного полукрыла и после суммирования скорости невозмущенного потока и скорости потока, набегающего на правое полукрыло, видно, что угол скольжения будет положительным.
При  момент
момент  будет стремиться уменьшить величину первоначального крена
будет стремиться уменьшить величину первоначального крена  , т.е. является «восстанавливающим». Моменты
, т.е. является «восстанавливающим». Моменты  называются управляющими в «канале крена» и при положительных
называются управляющими в «канале крена» и при положительных  обычно являются отрицательными, т.е.
обычно являются отрицательными, т.е.  <0 и
<0 и  <0.
<0. 
Моменты  называют управляющими в «канале рыскания». При отклонении элеронов, например, на правом полукрыле вниз а на левом вверх происходит перераспределение давление воздушного потока ближе к концам крыльев и в результате на правом увеличится нормальная сила
называют управляющими в «канале рыскания». При отклонении элеронов, например, на правом полукрыле вниз а на левом вверх происходит перераспределение давление воздушного потока ближе к концам крыльев и в результате на правом увеличится нормальная сила  (также и подъемная), а на левом - уменьшится (см. рис. 21).
(также и подъемная), а на левом - уменьшится (см. рис. 21).
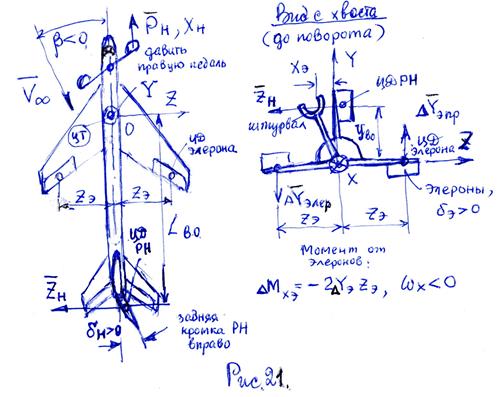
Прирост и уменьшение пропорциональны коэффициенту эффективности элеронов - и величине их отклонения  . При отклонении руля направления вправо (правая педаль - вперед). На вертикальном оперении (ВО) также происходит перераспределение давлений воздушного потока и возникает дополнительная поперечная сила
. При отклонении руля направления вправо (правая педаль - вперед). На вертикальном оперении (ВО) также происходит перераспределение давлений воздушного потока и возникает дополнительная поперечная сила  , которая создает на плече
, которая создает на плече  момент относительно ОХ
момент относительно ОХ  и одновременно та же сила создает момент относительно OY на плече
и одновременно та же сила создает момент относительно OY на плече  (который обычно в 5÷10раз больше
(который обычно в 5÷10раз больше  )
) 
Частная производная  - называется коэффициентом эффективности руля направления. Обычно момент относительно OY в 5÷10 раз больше чем момент относительно ОХ. При отклонении РН (т.к. >> ) повернуть ВС относительно OY легче чем относительно OX (инерционные свойства ВС:
- называется коэффициентом эффективности руля направления. Обычно момент относительно OY в 5÷10 раз больше чем момент относительно ОХ. При отклонении РН (т.к. >> ) повернуть ВС относительно OY легче чем относительно OX (инерционные свойства ВС:  сопротивление к повороту крыльев и ГО больше чем ВО) При совместном управлении элеронами и рулем направления ВС, слегка качнувшись влево, начинает разворачиваться левым полукрылом вперед, т.е. создается
сопротивление к повороту крыльев и ГО больше чем ВО) При совместном управлении элеронами и рулем направления ВС, слегка качнувшись влево, начинает разворачиваться левым полукрылом вперед, т.е. создается  . на левом полукрыле возникает большая подъемная сила, чем на правом и ВС развивает положительную
. на левом полукрыле возникает большая подъемная сила, чем на правом и ВС развивает положительную  и положительный крен, который по отношению к моменту от элеронов будет «тормозящим» вращение.
и положительный крен, который по отношению к моменту от элеронов будет «тормозящим» вращение.
Момент рыскания:  существенно зависит от угла атаки (см. рис. 22.)
существенно зависит от угла атаки (см. рис. 22.)
и при  на малых углах , чаще всего
на малых углах , чаще всего  и
и  , т.е. развивается
, т.е. развивается  и положительное скольжение , которое в итоге приведет к созданию «подкручивающего момента». Аналогично можно показать, что при
и положительное скольжение , которое в итоге приведет к созданию «подкручивающего момента». Аналогично можно показать, что при  - моменты развиваются
- моменты развиваются 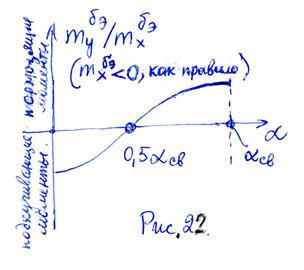
«тормозящие» (по отношению к исходным от отклонения элеронов). В зависимости от соотношения исходных моментов и «тормозящих» возможны случаи «обращения» управления.
Моменты  являются демпфирующими, в линейном диапазоне изменения
являются демпфирующими, в линейном диапазоне изменения  .Рассмотрим физическую природу этих моментов с помощью рис.23.
.Рассмотрим физическую природу этих моментов с помощью рис.23.

Пусть и на опускающееся правое полукрыло набегает дополнительный воздушный поток, зависящий от величины  и расстояния z от OX. На опускающемся полукрыле всегда угол атаки
и расстояния z от OX. На опускающемся полукрыле всегда угол атаки  и при
и при  , что в результате приводит к дополнительному моменту (обусловленному ), направленному в противоположную сторону вращения, тормозящему вращение, поэтому называется демпфирующим. При некоторых обычно их закритических углах атаки (режимах полета) может оказаться, что
, что в результате приводит к дополнительному моменту (обусловленному ), направленному в противоположную сторону вращения, тормозящему вращение, поэтому называется демпфирующим. При некоторых обычно их закритических углах атаки (режимах полета) может оказаться, что  и появляется момент
и появляется момент  , подкручивающий вращение (направлен в ту же сторону). Этот момент называют авторотирующим. При одном и том же исходном угле атаки,
, подкручивающий вращение (направлен в ту же сторону). Этот момент называют авторотирующим. При одном и том же исходном угле атаки,  является функцией Z и
является функцией Z и  , т.е.
, т.е.  , если принять
, если принять  по размаху полукрыла, то
по размаху полукрыла, то  . Чем больше тем больше
. Чем больше тем больше  и возможно изменение авторотирующих моментов на демпфирующие. Все зависит от соотношения
и возможно изменение авторотирующих моментов на демпфирующие. Все зависит от соотношения  и
и 
При варьировании  изменяются соотношения
изменяются соотношения  и
и  .Нормальная сила
.Нормальная сила  (направленная по ОХ, т.к <0, на рис.23) будет больше по модулю чем
(направленная по ОХ, т.к <0, на рис.23) будет больше по модулю чем  . (рис.24а)).
. (рис.24а)).

Разность этих сил создает момент относительно OY:  , который называется спиральным или перекрестным моментом рыскания.
, который называется спиральным или перекрестным моментом рыскания.
При вращении ВС относительно OY с угловой скоростью  , правое полукрыло имеет большую скорость, а левое – меньшую скорость по отношению к скорости полета и
, правое полукрыло имеет большую скорость, а левое – меньшую скорость по отношению к скорости полета и  и, например, для малых
и, например, для малых  изображены на рис.24б). Разность этих сил создает момент
изображены на рис.24б). Разность этих сил создает момент  ,препятствующий (тормозящий) вращение относительно OY и поэтому называется демпфирующим. Пара разностей сил
,препятствующий (тормозящий) вращение относительно OY и поэтому называется демпфирующим. Пара разностей сил  по отношению к
по отношению к  создают спиральный момент крена
создают спиральный момент крена  .
.
3.2 Статическая устойчивость в боковом движении
Различают путевую и поперечную статическую устойчивость с фиксированными и освобожденными органами и рычагами управления.
Путевая (флюгерная) статическая устойчивость – это способность ВС, самостоятельно, без вмешательства пилота в управление, противодействовать (уничтожать, ликвидировать) изменению угла скольжения.
О путевой (флюгерной) устойчивости и неустойчивости судят по знаку частной производной коэффициента момента рыскания по углу скольжения  , взятой в точке, соответствующей
, взятой в точке, соответствующей  .
.
При изменении угла скольжения  (рис.25) появляется
(рис.25) появляется  <0, стремящийся развернуть ВС вправо, т.е. уменьшить скольжение. На рис. показаны зависимости
<0, стремящийся развернуть ВС вправо, т.е. уменьшить скольжение. На рис. показаны зависимости  для устойчивого и неустойчивого ВС в путевом отношении.
для устойчивого и неустойчивого ВС в путевом отношении.
Частная производная называется степенью путевой статической устойчивости ВС.
При  - устойчивое ВС, >0- неустойчивое,
- устойчивое ВС, >0- неустойчивое,  - нейтральное в путевом отношении.
- нейтральное в путевом отношении.

Поперечная статическая устойчивость – это способность ВС, самостоятельно без вмешательства пилота в управление (противодействовать, уничтожать, ликвидировать) уменьшать возникший крен. При возникновении, например, правого крена появляется правое скольжение . Принимая во внимание зависимость  (см. рис. 26), при
(см. рис. 26), при 
возникает момент  , который создает
, который создает  и направлен на уменьшение крена. Это соответствует случаю, когда при возникновении скольжения ВС кренится в сторону отстающего полукрыла. Производная характеризует степень поперечной
и направлен на уменьшение крена. Это соответствует случаю, когда при возникновении скольжения ВС кренится в сторону отстающего полукрыла. Производная характеризует степень поперечной
статической устойчивости ВС.
3.3 Балансировка ВС в установившемся боковом движении.
Характеристики поперечной и путевой статической управляемости
Рассмотрим сначала установившийся ( прямолинейный полет с креном и скольжением (движение при скосе ветром, отказе двигателей, несимметричной компоновке ВС и т.д.). Определим проекцию всех сил, действующих на ВС на OY и OZ связной системы координат (см. рис. 27)
прямолинейный полет с креном и скольжением (движение при скосе ветром, отказе двигателей, несимметричной компоновке ВС и т.д.). Определим проекцию всех сил, действующих на ВС на OY и OZ связной системы координат (см. рис. 27)

Из условия равновесия сил по оси OY имеем:  откуда
откуда  и, тогда
и, тогда  .
.
Из условия равновесия по OZ (с учетом предыдущего соотношения)

Принимается, что  , тогда
, тогда  ;
;  , - поперечная составляющая тяги двигателей; i-число двигателей.
, - поперечная составляющая тяги двигателей; i-число двигателей.
Перейдем от сил и моментов к их коэффициентам, для чего разделим силы на qS, а моменты на qSl. Значения коэффициентов моментов приведены в (3.3), (3.4). Условия равновесия боковых моментов и сил примут вид
1. 
2.  (3.5)
(3.5)
3.  ;
;
Здесь: 
Балансировочные значения углов  определяются из системы (3.5) в зависимости от угла скольжения. Пренебрегая
определяются из системы (3.5) в зависимости от угла скольжения. Пренебрегая  получим
получим
 (3.6)
(3.6)
 (3.7)
(3.7)
 (3.8)
(3.8)
Потребные для балансировки отклонения педалей  и боковые отклонения штурвала (ручки)
и боковые отклонения штурвала (ручки)  равны
равны
 (3.9)
(3.9)
где  - коэффициенты передачи соответственно для путевого и поперечного управления ВС;
- коэффициенты передачи соответственно для путевого и поперечного управления ВС;
 , (3.10)
, (3.10)
где  вычисляется по формулам (3.7) для случая фиксированных рычагов управления (педалей, штурвала).
вычисляется по формулам (3.7) для случая фиксированных рычагов управления (педалей, штурвала).
Из выражений (3.6)…(3.9) видно, что с увеличением степени поперечной и путевой статической устойчивости расходы руля направления, элеронов и рычагов управления растут.
Балансировочные значения  можно выразить и в зависимости от угла крена
можно выразить и в зависимости от угла крена  . В этом случае (обозначив
. В этом случае (обозначив 
 (3.11)
(3.11)
где
 (3.12)
(3.12)
Так как  , то производные
, то производные  и
и  будут иметь такой же знак как
будут иметь такой же знак как  и
и  . Значения производных ,
. Значения производных ,  и определяются по формулам (3.7), (3.8) и (3.10).
и определяются по формулам (3.7), (3.8) и (3.10).
Лекция 6. 3.31. Усилия на рычагах управления элеронами и рулем направления в прямолинейном установившемся полете со скольжением
Усилия на штурвале (ручке) и педалях, потребные для балансировки ВС с обратимой и необратимой системами управления, можно представить в виде
 (3.13)
(3.13)
 (3.14)
(3.14)
Отличие для ОБУ и НБУ состоит лишь в том, что в (3.13) и (3.14) производные вычисляются по разному. Так как при НБУ усилия, которые должен прикладывать пилот к рычагам, зависят от характеристики загрузочных механизмов, то эти производные будут иметь вид
 (3.15)
(3.15)
 (3.16)
(3.16)
где  - градиенты усилий берутся из характеристик загрузочных механизмов; производные
- градиенты усилий берутся из характеристик загрузочных механизмов; производные  определяются по формулам (3.7), (3.12) и (3.8) в которых и надо брать для случая с фиксированным рычагом управления.
определяются по формулам (3.7), (3.12) и (3.8) в которых и надо брать для случая с фиксированным рычагом управления.

На рис 28 представлены типовые балансировочные зависимости, статически устойчивого и статически неустойчивого в поперечном и путевом отношении ВС при  неизменных конфигурации ВС и режима работы двигателей.
неизменных конфигурации ВС и режима работы двигателей.
Для нормального управления ВС требуется, чтобы все производные  были отрицательными.
были отрицательными.
Показатели поперечной статической управляемости:
 - называются соответственно коэффициентами расхода усилий и штурвала (ручки) управления на крен.
- называются соответственно коэффициентами расхода усилий и штурвала (ручки) управления на крен.
Показатели путевой (флюгерной) статической управляемости:  - называются коэффициентами расхода усилий и педалей на крен.
- называются коэффициентами расхода усилий и педалей на крен.
Для того чтобы ВС не было слишком «тяжелым» или «строгим» в поперечном и путевом управлении, производные  ,
,  ,
,  и
и  не должны выходить за допустимые пределы.
не должны выходить за допустимые пределы.
Гармоничность управления достигается за счет пропорциональности перемещений штурвала и педалей , т.е. за счет выбора производной
Дата добавления: 2015-08-27; просмотров: 47 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Аннотация. 3 страница | | | Аннотация. 5 страница |