|
Читайте также: |
Для ВС, обладающего продольной статической устойчивостью по перегрузке  и знак
и знак  определяется знаком
определяется знаком  . Представим
. Представим  в прямолинейном полете с переменной скоростью в виде
в прямолинейном полете с переменной скоростью в виде

тогда частная производная по числу М будет
 . (2.30)
. (2.30)
Отсюда видно, что при  , производная зависит от
, производная зависит от  и в частности его знака.
и в частности его знака.
В заключение этого раздела заметим, что аналогичные показатели статической устойчивости по перегрузке и скорости можно вывести для фиксированных и освобожденных рычагов управления. На ВС с необратимой бустерной системой управления применяются автоматы, отклоняющие органы управления при воздействии возмущений по определенному закону независимо от действия пилота. В этом случае степень статической устойчивости при фиксированном руле высоты ( ) будет отличаться от степени устойчивости при фиксированном положении рычагов управления (штурвала, ручки,
) будет отличаться от степени устойчивости при фиксированном положении рычагов управления (штурвала, ручки,  ).
).
Термин «освобожденное управление» не применим к ВС с НБУ. У таких ВС при освобождении штурвала рули не будут свободно отклоняться под действием шарнирных моментов, а будут удерживаться бустерами. Поэтому устойчивость ВС с освобожденным управлением не будет отличаться от устойчивости ВС с фиксированной ручкой (штурвалом) управления.
Лекция 4. 2.6. Балансировка ВС и характеристики статической управляемости в продольном движении
Балансировочными зависимостями (кривыми) называют отклонение органов управления ( ), рычагов управления (штурвал, педали, ручка) и усилия на рычагах управления в зависимости от скорости, высоты полета, перегрузки и т.п. на характерных режимах установившегося полета (горизонтальный полет с постоянной скоростью, горизонтальный полет с разгоном при постоянной перегрузке:, криволинейный полет с постоянной скоростью и др.).
), рычагов управления (штурвал, педали, ручка) и усилия на рычагах управления в зависимости от скорости, высоты полета, перегрузки и т.п. на характерных режимах установившегося полета (горизонтальный полет с постоянной скоростью, горизонтальный полет с разгоном при постоянной перегрузке:, криволинейный полет с постоянной скоростью и др.).
Рассмотрим один из управляющих параметров – усилие на рычаге управления Рв.
2.6.1. Усилие на штурвале
Пусть на руль высоты действуют аэродинамические силы,

которые создают момент относительно оси вращения, называемый шарнирным моментом.
 (2.31)
(2.31)
где  - коэффициент шарнирного момента,
- коэффициент шарнирного момента,  - соответственно площадь и САХ органа управления (руля),
- соответственно площадь и САХ органа управления (руля),  - коэффициент торможения потока в области оперения. Этот момент должен быть, компенсирован пилотом бустером или автоматическим устройством, улучшающим устойчивость и управляемость.
- коэффициент торможения потока в области оперения. Этот момент должен быть, компенсирован пилотом бустером или автоматическим устройством, улучшающим устойчивость и управляемость.
Пренебрегая потерями на трение в системе управления на основе «принципа возможных перемещений» (или элементарной работе сил и моментов) имеем
 . (2.32)
. (2.32)
Откуда
 (2.33)
(2.33)
где  - линейное перемещение верхней части штурвала (ручки),
- линейное перемещение верхней части штурвала (ручки),  - передаточный коэффициент в системе продольного управления (обычно
- передаточный коэффициент в системе продольного управления (обычно  ). Полагая, что коэффициент шарнирного момента руля высоты
). Полагая, что коэффициент шарнирного момента руля высоты  зависит линейно от
зависит линейно от  и (если имеется триммер; обычно при
и (если имеется триммер; обычно при  угол отклонения триммера
угол отклонения триммера  , заданная кромка отклоняется вверх)
, заданная кромка отклоняется вверх)  , то
, то
 . (2.34)
. (2.34)
После подстановки этого соотношения в (2.33) с учетом (2.31), получаем
 (2.35)
(2.35)
Как видно, величина  зависит от геометрических размеров руля высоты, скоростного напора q, а также отклонения триммера . В установившемся полете, подбирая значение можно снять усилия на штурвале ( = 0).
зависит от геометрических размеров руля высоты, скоростного напора q, а также отклонения триммера . В установившемся полете, подбирая значение можно снять усилия на штурвале ( = 0).
Режим полета с нулевым усилием на штурвале, т.е. на котором для балансировки ВС не требуется прикладывать усилия к штурвалу, называется балансировочным при свободном штурвале.
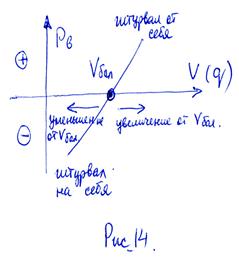
Для уменьшения усилий на штурвале и создания потребных значений (в соответствии с АП-25, АП-23) применяют бустеры и системы управления различают с обратимым (ОБУ) и необратимым (НБУ) бустерным управлением. При НБУ шарнирный момент не ощущается пилотом и полностью передается на конструкцию ВС через опору бустера. В этом случае, чтобы сохранить «естественность» управления ВС (см. рис. 14) при увеличении и уменьшении скорости от балансировочной, должно сохраняться правило отклонения штурвала.

При НБУ и линейной характеристике загрузочного механизма усилие на штурвале управления равно
 ,
,
где  - характеристика жесткости загрузочного механизма. С целью улучшения управляемости используют нелинейную характеристику загрузочного механизма (с «изло- мом»), чтобы усилия были побольше при малых потребных перемещениях штурвала и поменьше - при больших
- характеристика жесткости загрузочного механизма. С целью улучшения управляемости используют нелинейную характеристику загрузочного механизма (с «изло- мом»), чтобы усилия были побольше при малых потребных перемещениях штурвала и поменьше - при больших  . В противном случае при малых и малых Рв и небольших ошибках пилотирования может произойти значительное увеличение нормальной перегрузки, а при больших пилоту придется прикладывать слишком большие усилия для управления.
. В противном случае при малых и малых Рв и небольших ошибках пилотирования может произойти значительное увеличение нормальной перегрузки, а при больших пилоту придется прикладывать слишком большие усилия для управления.
2.6.2. Балансировка ВС в установившемся горизонтальном полете
Определим угол (или  ), перемещение
), перемещение  , потребные для балансировки ВС в установившемся (V=const) горизонтальном полете (Н=const,
, потребные для балансировки ВС в установившемся (V=const) горизонтальном полете (Н=const,  =0) полете. Приравнивая нулю (2.24) при
=0) полете. Приравнивая нулю (2.24) при  , получим при
, получим при 
 , (2.36)
, (2.36)
где  при
при  . (см. рис. 16)
. (см. рис. 16)  (примем постоянной, не зависящей от изменения ).
(примем постоянной, не зависящей от изменения ).

Аналогичная зависимость имеет место при изменении  . Полный коэффициент
. Полный коэффициент  с учетом изменений и будет
с учетом изменений и будет
 . (2.37) Принимая во внимание (2.11) и (2.12)
. (2.37) Принимая во внимание (2.11) и (2.12)
 . (2.38)
. (2.38)
С учетом этих соотношений, а также выражения (2.37), получаем
 , (2.39)
, (2.39)
где  коэффициенты эффективности стабилизатора и руля высоты определяются при постоянном значении
коэффициенты эффективности стабилизатора и руля высоты определяются при постоянном значении  по формулам
по формулам
 (2.40)
(2.40)
Из (2.39), принимая приближенно  ; определим балансировочное отклонение руля высоты
; определим балансировочное отклонение руля высоты

 (2.41)
(2.41)
а потребное балансировочное отклонение штурвала, учитывая, что  ,
,
 (2.42)
(2.42)
Типовые балансировочные зависимости (кривые, диаграммы) приведены на рис.17.

Кроме приведенных характеристик, на управляемость ВС большое влияние оказывают производные  Их значения должны отвечать естественным рефлексам пилота и обращение управления (на рис. 17 обозначено пунктиром) не допускается.
Их значения должны отвечать естественным рефлексам пилота и обращение управления (на рис. 17 обозначено пунктиром) не допускается.
2.6.3. Балансировка ВС в установившемся криволинейном движении в вертикальной плоскости
В отличие от режима горизонтального полета (см. раздел 2.5, когда принимались:  ) в установившемся криволинейном движении (в окрестности некоторого режима горизонтального полета)
) в установившемся криволинейном движении (в окрестности некоторого режима горизонтального полета)  и с учетом (2.25), (2.26) его можно представить в виде
и с учетом (2.25), (2.26) его можно представить в виде
 (2.43)
(2.43)
где с учетом (2.37), (2.38)

Выразим  в зависимости от
в зависимости от  . для этой цели воспользуемся приближенными соотношениями
. для этой цели воспользуемся приближенными соотношениями

и соответственно приращение можно выразить как функцию приращения
 ,
,
откуда
 . (2.44)
. (2.44)
Подставляя выражение для  в (2.43), получим условие балансировки (
в (2.43), получим условие балансировки ( ) в криволинейном движении с
) в криволинейном движении с  и изменением перегрузки на величину
и изменением перегрузки на величину  (при малом изменении от режима горизонтального полета)
(при малом изменении от режима горизонтального полета)
 (2.45)
(2.45)
где определяются соотношениями (2.40).
Из этого уравнения определим балансировочное значения угла отклонения руля высоты, потребное для криволинейного полета с , в малой окрестности заданного опорного режима горизонтального полета ( )
)
 (2.46)
(2.46)
Дифференцируя по  (учитывая, что ≈ -1), получаем
(учитывая, что ≈ -1), получаем
 (2.47)
(2.47)
Тогда (2.46) можно представить в виде
 , (2.48)
, (2.48)
где  определяются по (2.41).
определяются по (2.41).
Потребные для балансировки отклонения штурвала (ручки) управления рулем высоты в установившемся криволинейном полете определяется из (2.42), принимая во внимание (2.48)
 (2.49)
(2.49)
где

 . (2.50)
. (2.50)
Заметим, что в случае использования автомата продольного управления вместо  следует использовать
следует использовать  - степень статической устойчивости по перегрузке при фиксированном штурвале.
- степень статической устойчивости по перегрузке при фиксированном штурвале.
Производная  - называется коэффициентом расхода штурвала на перегрузку (фактически, для изменения перегрузки на единицу) при
- называется коэффициентом расхода штурвала на перегрузку (фактически, для изменения перегрузки на единицу) при  ,
,  и фиксированном руле высоты (фиксированном рычаге управления, если вместо использовать ).
и фиксированном руле высоты (фиксированном рычаге управления, если вместо использовать ).
Усилие на штурвале для балансировки в криволинейном полете аналогично можно представить в виде
 , (2.51)
, (2.51)
где  - приращение усилия на штурвале по сравнению с потребным для горизонтального полета
- приращение усилия на штурвале по сравнению с потребным для горизонтального полета  (2.35). Для ВС с НБУ выражение (2.51) чаще представляют в другой форме
(2.35). Для ВС с НБУ выражение (2.51) чаще представляют в другой форме
 (2.52)
(2.52)
где  - называется коэффициентом расхода усилий на перегрузку. Типовые балансировочные кривые
- называется коэффициентом расхода усилий на перегрузку. Типовые балансировочные кривые  ,
,  представлены на рис. 18.
представлены на рис. 18.

АП-25. (А). На режимах полета и конфигурациях ВС, рекомендованных руководством по летной эксплуатации (РЛЭ), в диапазоне перегрузок  до
до  , установленных РЛЭ, и балансировке по условиям в установившемся прямолинейном полете, производные
, установленных РЛЭ, и балансировке по условиям в установившемся прямолинейном полете, производные  должны быть отрицательными и по абсолютной величине
должны быть отрицательными и по абсолютной величине  рекомендуется не менее 10 кгс,
рекомендуется не менее 10 кгс,  - не менее 5 см. Усилия на штурвале, потребные для создания
- не менее 5 см. Усилия на штурвале, потребные для создания  до срабатывания сигнализации о приближении к сваливанию в конфигурации, рекомендованный РЛЭ для полета по маршруту, при балансировке ВС по усилию в исходном режиме прямолинейного полета, рекомендуется по абсолютной величине не менее 25 кГс.
до срабатывания сигнализации о приближении к сваливанию в конфигурации, рекомендованный РЛЭ для полета по маршруту, при балансировке ВС по усилию в исходном режиме прямолинейного полета, рекомендуется по абсолютной величине не менее 25 кГс.
(В) На режимах полета и при конфигурациях ВС, рекомендованных РЛЭ, при балансировке ВС по усилиям в исходном режиме прямолинейного полета, производные должны быть отрицательными до перегрузки . При дальнейшем уменьшении перегрузки до  или до достижения
или до достижения  , установленной РЛЭ, если
, установленной РЛЭ, если  , либо до перегрузке, соответствующей полному отклонению штурвала «от себя», допускается изменение знака производных . В этих случаях уменьшение усилий на штурвале не должно превышать 30% от их максимальной величины. На минимальной достигнутой перегрузке усилия в продольном управлении должны превышать усилия трения в системе продольного управления не менее, чем в три раза.
, либо до перегрузке, соответствующей полному отклонению штурвала «от себя», допускается изменение знака производных . В этих случаях уменьшение усилий на штурвале не должно превышать 30% от их максимальной величины. На минимальной достигнутой перегрузке усилия в продольном управлении должны превышать усилия трения в системе продольного управления не менее, чем в три раза.
(С). Перекрестные связи не должны вносить (по оценке пилота) особенностей, затрудняющих пилотирование.
2.6.4. Особенности продольной балансировки при взлете и посадке
При взлете и посадке производится выпуск закрылков, уборка и выпуск шасси, тормозных щитков и др. управляемых поверхностей (механизации), облегчающих пилотирование на этих режимах. Кроме этого, в непосредственной близости земли происходит существенное изменение аэродинамических сил из-за «экранного» эффекта. Это приводит к тому, что при взлете и посадке приходится уточнять зависимость коэффициента момента тангажа при полете ВС вблизи земли с отклоненной механизацией (закрылков, щитков, предкрылков)
 , (2.53)
, (2.53)
где  - коэффициент момента тангажа при
- коэффициент момента тангажа при  , равный
, равный

 - прирост
- прирост  за счет выпущенного шасси;
за счет выпущенного шасси;  - дополнительные скосы потока у ГО за счет выпущенных закрылков и механизации с учетом экранного эффекта;
- дополнительные скосы потока у ГО за счет выпущенных закрылков и механизации с учетом экранного эффекта;  - прирост коэффициента подъемной силы, обусловленный экранным эффектом земли; существенен, когда расстояние фокуса ВС до земли (h) меньше полуразмаха крыла (h/l)<0.5. В этом случае подъемная сила увеличивается на ≈20% и более;
- прирост коэффициента подъемной силы, обусловленный экранным эффектом земли; существенен, когда расстояние фокуса ВС до земли (h) меньше полуразмаха крыла (h/l)<0.5. В этом случае подъемная сила увеличивается на ≈20% и более;  - относительная координата положения фокуса по углу отклонения механизации, отсчитанная от носка САХ крыла в направлении отрицательной полуоси ОХ; на режиме посадке величина
- относительная координата положения фокуса по углу отклонения механизации, отсчитанная от носка САХ крыла в направлении отрицательной полуоси ОХ; на режиме посадке величина  - берутся для посадочной, а на режиме взлета – взлетной конфигурации. При расчете коэффициента
- берутся для посадочной, а на режиме взлета – взлетной конфигурации. При расчете коэффициента  надо иметь в виду, что при взлете используется максимальный режим работы двигателей, а при посадке – режим «малого газа».
надо иметь в виду, что при взлете используется максимальный режим работы двигателей, а при посадке – режим «малого газа».
Различные зависимости для балансировочных параметров нетрудно получить из условия равенства нулю выражения (2.53). Следует выделить особо случай при разбеге ВС по полосе в момент подъема переднего колеса шасси. При этом на задние колеса действует при пробеге силы трения о полосу аэродрома, создающие дополнительный пикирующий момент (в момент, когда переднее колесо шасси оторвалось от полосы) и требуется дополнительно отклонять руль высоты, чтобы его сбалансировать. Поэтому балансировка ВС при подъеме переднего колеса может оказаться расчетным случаем для определения предельной передней центровки.
2.6.5. Диапазон допустимых центровок и требования к выбору параметров горизонтального оперения
На этапе предварительного проектирования ВС определяют допустимый диапазон возможных изменений положения центра тяжести в зависимости от допустимых условий устойчивости и управляемости. Рассмотрим вывод основных расчетных соотношений для этой цели. Из формулы для (2.26) видно, что при изменении положения  , значение может быть равно нулю, ВС при этом становится нейтральным по перегрузке. Такую «центровку» называют нейтральной, а ее величина определяется по формуле
, значение может быть равно нулю, ВС при этом становится нейтральным по перегрузке. Такую «центровку» называют нейтральной, а ее величина определяется по формуле
 . (2.54)
. (2.54)
Здесь вторая составляющая справа обычно изменяется в пределах 0,5÷2% САХ и таким образом нейтральная центровка расположена на небольшом расстоянии за фокусом по углу атаки ВС.
Для обеспечения требуемого минимального запаса устойчивости  следует отступить от нейтральной центровки вперед на величину . Из этого условия определяется допустимая задняя центровка
следует отступить от нейтральной центровки вперед на величину . Из этого условия определяется допустимая задняя центровка
 (2.55)
(2.55)
Положение  меняется по режимам полета и обычно предельно смещена вперед на малых скоростях. Из всех возможных положений и следовательно
меняется по режимам полета и обычно предельно смещена вперед на малых скоростях. Из всех возможных положений и следовательно  выбираются такие, для которых условия устойчивости будут гарантированными для любого наихудшего режима полета. Такое положение
выбираются такие, для которых условия устойчивости будут гарантированными для любого наихудшего режима полета. Такое положение  называется предельно задней центровкой.
называется предельно задней центровкой.
Предельно переднюю центровку определяют из условия балансировки ВС при посадке (или разбеге в момент отрыва переднего колеса шасси на взлете) когда производится предельное отклонение руля высоты  и посадочное положение стабилизатора
и посадочное положение стабилизатора  .
.
При прямолинейном полете (возможно при взлете и посадке с предельным отклонением стабилизатора и рулей высоты и при требуемом угле атаки) при  из (2.24) с учетом (2.11), (2.12), а также зависимости
из (2.24) с учетом (2.11), (2.12), а также зависимости  , принимая
, принимая  , получаем
, получаем
 . (2.56)
. (2.56)
Здесь  - требуемое значение
- требуемое значение  при движении по прямолинейной траектории.
при движении по прямолинейной траектории.
Другим условием для выбора  является режим захода на посадку с выпущенной механизацией с учетом экранных эффектов земли
является режим захода на посадку с выпущенной механизацией с учетом экранных эффектов земли
 (2.57)
(2.57)
Аналогичный расчет  производится для момента отрыва переднего колеса при взлете. Среди всех возможных условий определения выбирается наихудший, чтобы определить гарантированное его значение
производится для момента отрыва переднего колеса при взлете. Среди всех возможных условий определения выбирается наихудший, чтобы определить гарантированное его значение  , которое называют предельно передней центровкой.
, которое называют предельно передней центровкой.
Требования к выбору параметров горизонтального оперения определяются исходя из приемлемых характеристик статической устойчивости и управляемости во всей эксплуатационной области режимов полета (V, H), различных вариантах загрузки ВС, т.е. чтобы
 -
-  (2.58)
(2.58)
где  - максимальный эксплуатационный диапазон центровок, а значения и - предельно заднее и предельно переднее определяются для наихудших (гарантированных) возможных вариантов полета.
- максимальный эксплуатационный диапазон центровок, а значения и - предельно заднее и предельно переднее определяются для наихудших (гарантированных) возможных вариантов полета.
С ростом  , увеличивается
, увеличивается  а также фокус и смещаются назад. Одновременно, при неизменной
а также фокус и смещаются назад. Одновременно, при неизменной  растет эффективность руля высоты и сдвигается вперед (см. рис. 19).
растет эффективность руля высоты и сдвигается вперед (см. рис. 19).
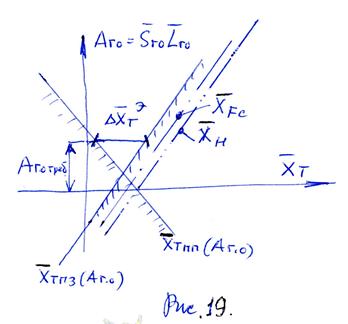
На графике можно отложить и найти минимальное потребное  и следовательно
и следовательно  потребные для выполнения условий устойчивости и управляемости.
потребные для выполнения условий устойчивости и управляемости.
АП-25. 25.146(Д) Запас эффективности продольного управления при подъеме носового колеса и отрыве ВС, а также при посадке в том числе в момент касания  , должны быть не менее 10%.
, должны быть не менее 10%.
25.161. (С) Продольная балансировка должна обеспечиваться в следующих условиях:
(1) при наборе высоты на режиме максимальной продолжительной тяги со скоростью не выше  , с убранным шасси и закрылками в убранном (i) и во взлетной (ii) положениях.
, с убранным шасси и закрылками в убранном (i) и во взлетной (ii) положениях.  - скорость сваливания или минимальная скорость установившегося полета, полученная в конкретной конфигурации.
- скорость сваливания или минимальная скорость установившегося полета, полученная в конкретной конфигурации.
Дата добавления: 2015-08-27; просмотров: 40 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Аннотация. 2 страница | | | Аннотация. 4 страница |