Читайте также:
|
В данной лабораторной работе была рассмотрена динамика самолёта без учёта и с учётом динамики привода. На основании модели самолёта в продольном движении и привода рулей высоты были построены две системы управления: система управления нормальной перегрузкой и система управления углом тангажа. При проверке воздействия на системы возмущающего момента и ветрового воздействия, был сделан вывод, что системы статические, т.е. при возмущении имеют статическую ошибку. Системы были сделаны астатическими за счёт введения интегрирующего звена в прямую цепь систем управления и замыкания систем единичной обратной связью. В итоге системы получились астатическими и отрабатывали возмущающий момент и ветровое воздействие за конечное время без статической ошибки.
ЛАБОРАТОРНАЯ РАБОТА №3.
Структурная схема САУ высотой полета по перегрузочному контуру (не устойчивая):
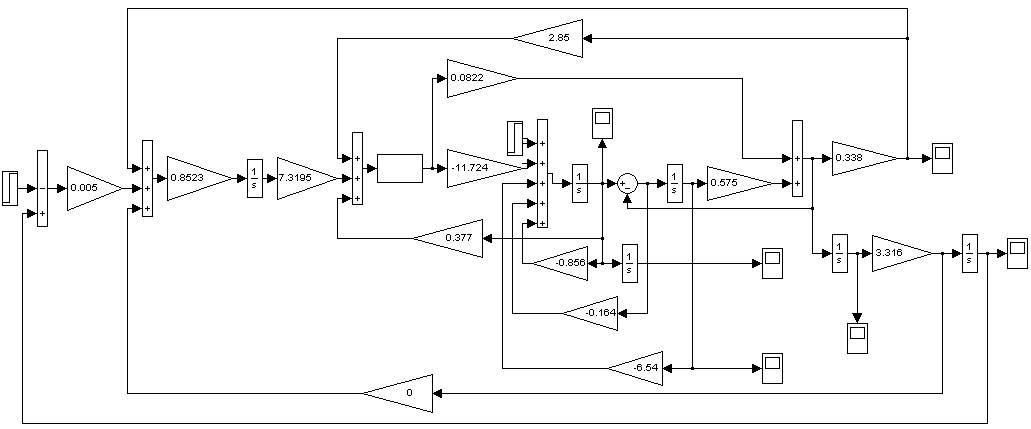
Подадим на вход системы заданное значение высоты = 100. Построим переходный процесс по высоте:
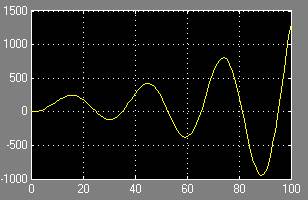
Как видим из графика, САУ высотой получилась не устойчива. Это связано с тем, что в прямой цепи стоит два интегрирующих звена охваченных лишь одной обратной связью. Чтобы сделать систему устойчивой, добавим обратную связь по вертикальной скорости. Подберем коэффициент обратной связи так, чтобы САУ имела удовлетворительные динамические характеристики.
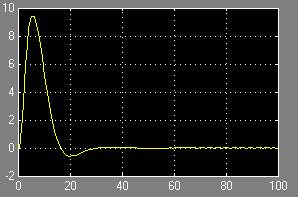
Структурная схема САУ высотой полета по перегрузочному контуру (устойчивая):

Подадим на вход системы сигнал равный 100. Построим переходный процесс по высоте:

САУ стала устойчивой.
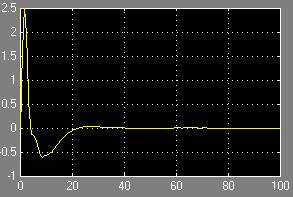
Проверим реакцию системы на возмущающий момент. Построим переходный процесс по высоте:
Как видим из графика, система астатическая. САУ стабилизирована по высоте.
Проверим реакцию системы на ветровое воздействие.
Дата добавления: 2015-10-21; просмотров: 210 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| АСТАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА. | | | Ход работы |