Читайте также:
|
По итогам анализа динамики самолёта в п.1 был сделан вывод, что динамика самолёта является неудовлетворительной. Для управления динамикой переходных процессов может быть добавлен закон управления.
При идеальных (безынерционных) исполнительных устройствах (ИУ) и датчиках закон отклонения рулей по перегрузочному контуру можно записать в виде:
 ,
,
где  – заданное значение перегрузки.
– заданное значение перегрузки.
Без учёта сил руля высоты ( ) выведем передаточную функцию самолёта по углу атаки от угла отклонения рулей высоты.
) выведем передаточную функцию самолёта по углу атаки от угла отклонения рулей высоты.
Из уравнения (1):

Подставим выражение для  в уравнение (2):
в уравнение (2):


д 
Подставим выражения для  ,
,  ,
,  и
и  в уравнение (3):
в уравнение (3):




Введём обозначения:


Подставим их в расчетную формулу и сделаем преобразование Лапласа:

Выразим нормальную перегрузку через  :
:

Тогда передаточная функция по нормальной перегрузке примет вид:

Коэффициент усиления по нормальной перегрузке:

а градиент перемещения:

Из выражения передаточной функции замкнутой системы следует, что с помощью трёх передаточных чисел можно изменять все три характеристики управляемости ξ, Ω и  ,
,
Если задать значения этих характеристик, то нетрудно вычислить необходимые для этого величины передаточных чисел:



Зададим желаемые характеристики управляемости:


Тогда с учётом заданных критериев управляемости:

найдём:


Вычислим передаточные числа для выбранных характеристик управляемости:



Коэффициент  подсчитан без учета динамического коэффициента
подсчитан без учета динамического коэффициента  . В связи с этим результирующее значение нормальной перегрузки не будет равно заданному значению. Это можно исправить путем подбора коэффициента на рабочей модели системы в среде Simulink.
. В связи с этим результирующее значение нормальной перегрузки не будет равно заданному значению. Это можно исправить путем подбора коэффициента на рабочей модели системы в среде Simulink.
В результате подбора было получено значение коэффициента , обеспечивающее заданное значение перегрузки на выходе.

Закон управления: 

Рис. 15. Статическая система автоматического управления нормальной перегрузкой.
Подадим на вход системы сигнал  .
.
Построим переходные процессы по основным координатам.

Рис. 16. П/п по углу атаки  .
.

Рис. 17. П/п по нормальной перегрузке 

Рис. 18. П/п по углу наклона траектории 

Рис. 19. П/п по угловой скорости 

Рис. 20. П/п по углу тангажа  .
.
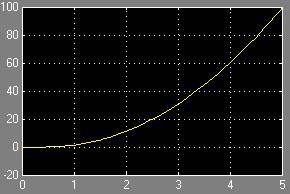
Рис. 21. П/п по высоте 
Подадим на вход системы сигнал  .
.
Зададим возмущающий момент равный  .
.
В структурной схеме возмущающий момент прибавлен к . Построим переходный процесс по  .
.

Рис. 22. П/п по нормальной перегрузке
Подадим на вход системы сигнал .
Зададим возмущающий момент равный .
Построим переходный процесс по .

Рис. 23. П/п по нормальной перегрузке
Выводы по п.3 работы: СТАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НОРМАЛЬНОЙ ПЕРЕГРУЗКОЙ.
В третьем пункте работы был добавлен закон управления в виде:  , и рассчитаны коэффициенты. Динамика привода приобрела желаемые параметры: перерегулирование в пределах 5%, время переходного процесса по нормальной перегрузке равно 0.75 секунды.
, и рассчитаны коэффициенты. Динамика привода приобрела желаемые параметры: перерегулирование в пределах 5%, время переходного процесса по нормальной перегрузке равно 0.75 секунды.
Также была проверена реакция системы на возмущающий момент при отсутствии входного, и при входном сигнале . На графике переходного процесса по нормальной перегрузке появилась статическая ошибка равная 0.3.
Итак, система автоматического управления получилась статической по отношению к возмущающему моменту.
Дата добавления: 2015-10-21; просмотров: 333 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ЗАДАНИЕ. | | | АСТАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НОРМАЛЬНОЙ ПЕРЕГРУЗКОЙ. |