Читайте также:
|
По итогам анализа динамики самолёта в п.1 и п.2 был сделан вывод, что динамика самолёта является неудовлетворительной. Для управления динамикой переходных процессов может быть добавлен закон управления.
При идеальных (безынерционных) исполнительных устройствах ( ) закон отклонения рулей для управления углом тангажа можно записать в виде:
) закон отклонения рулей для управления углом тангажа можно записать в виде:

Структурная схема системы управления представлена на рисунке 33.
Коэффициент обратной связи по угловой скорости  и коэффициент усиления ошибки по углу тангажа
и коэффициент усиления ошибки по углу тангажа  примем равными:
примем равными:


Подадим на вход системы сигнал 
Построим переходный процесс по углу тангажа:

Рис. 31. П/п по углу тангажа 
Процесс получился затянутым. Попытаемся увеличить быстродействие системы за счёт увеличения коэффициентов и .



Рис. 32. П/п по углу тангажа
Дальнейшее увеличение коэффициентов и приведёт к возрастанию перерегулирования и неустойчивости системы.
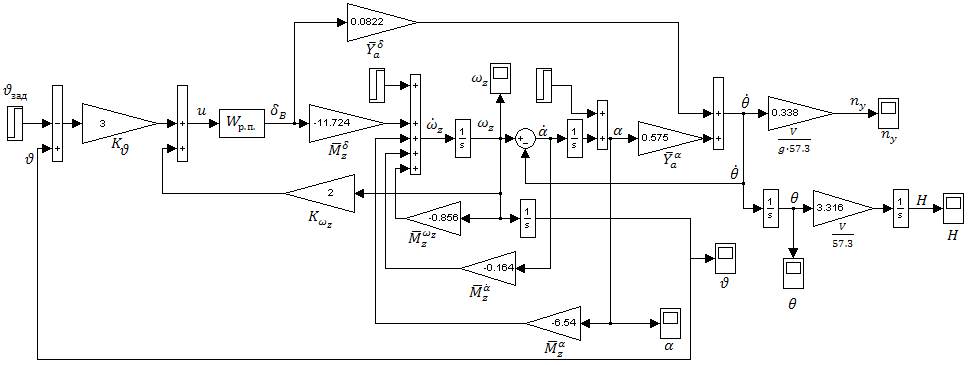
Рис. 33. Структурная схема системы автоматического управления углом тангажа.
Подадим на вход системы сигнал
Построим переходные процессы по основным координатам.

Рис. 34. П/п по углу атаки  .
.
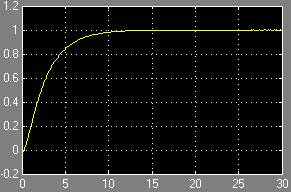
Рис. 35. П/п по углу наклона траектории  .
.
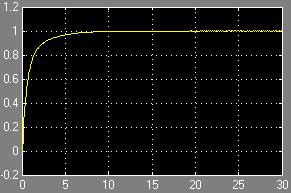
Рис. 36. П/п по углу тангажа 

Рис. 37. П/п по высоте  .
.
Подадим на вход системы сигнал  .
.
Зададим возмущающий момент равный  .
.
Построим переходные процессы.

Рис. 38. П/п по углу наклона траектории .

Рис. 39. П/п по углу тангажа  .
.
Подадим на вход системы сигнал 
Зададим ветровое воздействие равное  .
.
Построим переходные процессы.

Рис. 40. П/п по углу наклона траектории .

Рис. 41. П/п по углу тангажа .
Выводы по п.5 работы: СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА.
В пятом пункте была построена система управления углом тангажа. Закон управления имел вид:  . Коэффициенты обратных связей можно найти двумя путями: расчётным (аналитическим) или методом подбора.
. Коэффициенты обратных связей можно найти двумя путями: расчётным (аналитическим) или методом подбора.
В первом случае нужно вывести передаточную функцию по углу тангажа от задающего входного воздействия и получить формулы зависимости коэффициентов от желаемых параметров динамики системы. Этот путь был реализован при построении системы автоматического управления нормальной перегрузкой.
В данной части работы был использован второй путь: метод подбора. Было достигнуто время переходных процессов: 8 секунд.
Была проверена реакция системы на возмущающий момент и ветровое воздействие.
При возмущающем моменте на графиках п/п по углу наклона траектории была статическая ошибка, равная 1.05, а по углу тангажа была статическая ошибка, равная 0.7.
При ветровом воздействии на графике п/п по углу наклона траектории была статическая ошибка, равная ветровому воздействию: 3. А по углу тангажа система стала астатической (по отношению к ветровому воздействию).
Дата добавления: 2015-10-21; просмотров: 144 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| АСТАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НОРМАЛЬНОЙ ПЕРЕГРУЗКОЙ. | | | АСТАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА. |