Читайте также:
|
 Використовуючи послідовну корекцію, отримати систему із заданими характеристиками (рис. 1):
Використовуючи послідовну корекцію, отримати систему із заданими характеристиками (рис. 1):
Рис. 1.
де  .
.
Час регулювання в системі повинен бути  , час встановлення
, час встановлення  , а перерегулювання
, а перерегулювання 
Результати розрахунку і експериментального дослідження занести до табл. 1.
Таблиця 1
| Системи | Вид дослідження | Стійкість | 
| 
| 
| 
| 
|
| Некориго- вана | Розрахунковий | ||||||
| Коригова- на | Експериментальний |
1. Експериментальне дослідження некоригованої САУ.
Передаточна функція некоригованої системи:

Для некоригованої САУ схема електронної моделі, розробленої в середовищі Matlab, матиме вигляд (рис. 2):

Рис. 2
1.1. Дослідити показники якості перехідного процесу  САУ в перехідному режимі (при
САУ в перехідному режимі (при 
 К=1, 2, 5, 10, 50 (рис. 4а).
К=1, 2, 5, 10, 50 (рис. 4а).
1.2. Дослідити динамічну помилку в системі x (t)=2t (рис. 5б).
1.3. Дослідити точність САУ при випадкових вхідних діях методом 3-х  .
.
1.4. Результати моделювання занести у бланк звіту (рис.4а, 5б).
2. Експериментальне дослідження САУ, скоригованої послідовним коригуючим пристроєм.
Передаточна функція скоригованої системи:
 .
.
Для коригованої САУ схема електронної моделі, розробленої в середовищі Matlab, матиме вигляд (рис. 3):

Рис. 3
2.1. Дослідити показники якості перехідного процесу  САУ в перехідному режимі (при
САУ в перехідному режимі (при 
 К=1, 2, 5, 10, 50 (рис. 4).
К=1, 2, 5, 10, 50 (рис. 4).

| 
|
Рис. 4.
Графік помилки та перехідної характеристики
некоректованої та коректованої САУ
2.2. Дослідити динамічну помилку в системі x (t)=2t (рис. 5).

| 
|
| Рис. 5. Графік помилки та перехідної характеристики некоректованої САУ | Рис. 6. Графік помилки та перехідної характеристики САУ з послідовною корекцією |
2.3. Дослідити точність САУ при випадкових вхідних діях методом 3-х .
2.4. Результати моделювання занести у бланк звіту.
2.5. Провести порівняльний аналіз некоригованої та коригованої САУ.
2.6. Дослідити показники якості САУ при випадкових вхідних діях.
На вхід системи подається випадковий сигнал з нормальним законом розподілення та нульовим математичним сподіванням.
Результати моделювання зображено на рисунках 7 та 8.

Рис. 7.
Дослідження точності некоригованої САУ
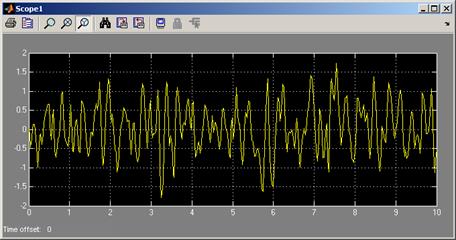
Рис. 8.
Дослідження точності коригованої САУ
Дисперсія помилки від збурення визначається методом трьох сігма.
 =
=  = 4/3^2=1,7 В^2.
= 4/3^2=1,7 В^2.
Дисперсія помилки від збурення визначається методом трьох сігма.
= = 1,7 /3^2=0,32 В^2.
Результати моделювання підтвердили теоретичні розрахунки.
ЗМІСТ ЗВІТУ.
1. Номер та назва лабораторної роботи.
2. Мета роботи.
3. Передаточні функції та схеми САУ, які підлягали дослідженню.
4. Осцилограми перехідних процесів та значення показників якості при різних коефіцієнтах.
5. Висновки за кожним пунктом дослідження та загальний висновок (про вплив параметрів САУ на перехідний процес та оцінка методів дослідження).
Дата добавления: 2015-09-03; просмотров: 44 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Заключна частина | | | Оценка научной публикации |