Читайте также:
|
Механізм з мехатронним керуванням важеля підйому ПЛ (рис.2.7.1) є більш складною вдосконаленою моделлю найпростішого механізму ПЛ з керуванням на базі мехатроніки, яка була розглянута в підрозділі 2.6 ВМР. Структурною особливістю такого механізму є прямий кінематичний зв'язок штоку ПнЦ з важелем підйому притискної лапки. В порівнянні з найпростішою схемою, кількість ланок такого механізму збільшується. Але при цьому, хід штоку циліндра, який забезпечив би підйом ПЛ на необхідну висоту, є незрівнянно меншим, а швидкість та різкість піднятті ПЛ – значно більшою, чим усувається основний недолік найпростішої моделі механізму ПЛ з мехатронним керуванням. Це означає, що механізм з мехатронним керуванням важеля підйому ПЛ є набагато швидкодіючим і не гальмує роботи машини в цілому.
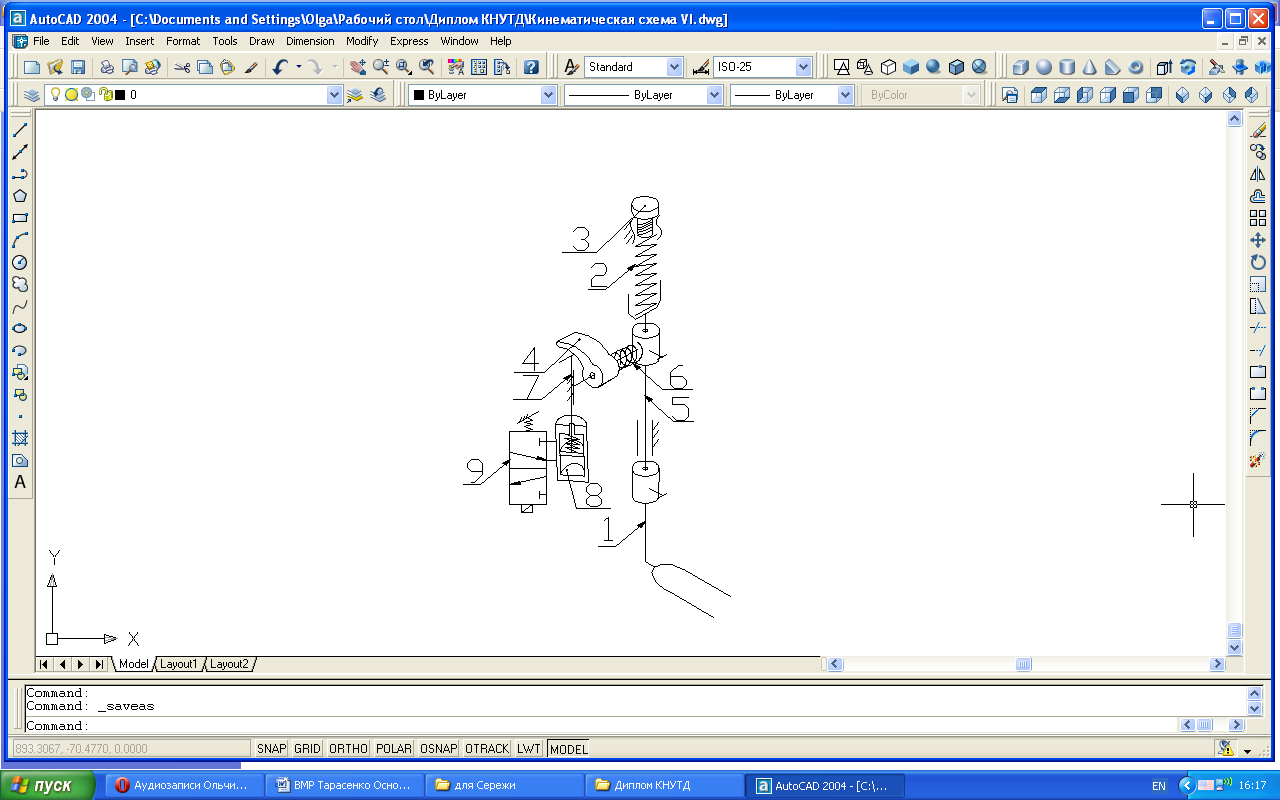
1- притискна лапка;
2-пружний елемент;
3-гвин регулювання;
4-важіль;
5-вертикальний вал;
6-пружина, що забезпечує постійний контакт в системі «шток-важіль»;
7-шток ПнЦ;
8-ПнЦ;
9-соленоїд з моностабільним керуванням.
Рис. 2.7.1.Схема механізму притискної лапки з керуванням
важеля підйому на базі мехатроніки
Також, цей механізм ПЛ можна вважати вдосконаленням класичного механізму з пружним елементом, що був розглянутий в підрозділі 2.1 ВМР. Порівнюючи ці механізми між собою можна прийти до висновку, що мехатронні система керування замінює ручне керування працівника. Отже, додаткове оснащення класичного механізму ПЛ системою керування на базі мехатроніки є ніщо інше як автоматизація роботи даної машини, що усуває основний недолік цього механізму у класичному виконанні – неможливість керування положенням ПЛ під час роботи машини,через що такий механізм ПЛ був непридатним для швейно-вишивальних машин та промислових вишивальних напівавтоматів.
Дата добавления: 2015-08-26; просмотров: 85 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Механізм ПЛ на основі найпростішої мехатронної системи керування | | | Квазі»-механізм ПЛ кулачково-кулісного типу |