Читайте также:
|
Механізм ПЛ може мати незалежне керування та виступати в якості окремого механізму, що ніяк не з’єднаний з іншими механізмами машини. При цьому його «діями» керуватиме контролер – своєрідний міні-компьютер, «запрограмований інтелект», який широко використовується на автоматизованих підприємствах. Особливістю роботи контролера є використання двійкової системи, тобто можливі набуті значення – це «1», тобто «істина» та «0», тобто «фальш».
Такий механізм ПЛ можна представити в такому вигляді (рис.2.6.1): ПЛ 1, закріплена на стержні 2, який являє собою продовження штоку ПнЦ 3, інша сторона якого знаходиться під дією пружного елемента 4, на кінці якого встановлений гвинт регулювання 5. Положення штоку визначається тиском повітря в половинках ПнЦ, оскільки за законами фізики система завжди намагатиметься його зрівняти. Тиск в коморах ПнЦ керується соленоїдом за допомогою втискання стиснутого повітря з компресора.
Вихідним положенням ПЛ буде крайнє нижнє положення притискної лапки, яка, знаходячись під дією пружного елемента, притискає матеріал. При необхідності підняття ПЛ спрацьовує соленоїд, стиснуте повітря втискається в нижню комору ПнЦ і, долаючи опір пружного елемента, піднімає шток разом із закріпленою на ньому ПЛ.
Для безпомилкової роботи механізму ПЛ на базі мехатронної системи керування машина має бути додатково оснащена датчиками положення, які будуть надсилати сигнали про точне розташування ПЛ в часі.
Головною перевагою наведеного механізму є плавність та безударність роботи.
Серед основних недоліків можна виокремити наступні:
- Складнощі синхронізації наведеного механізму з іншими механізмами машини;
- Проблеми із запізненням дії, оскільки плавність роботи означає також і поступовість підняття ПЛ;
- Повільніша робота машини;
- Дороговизна складових механізму.
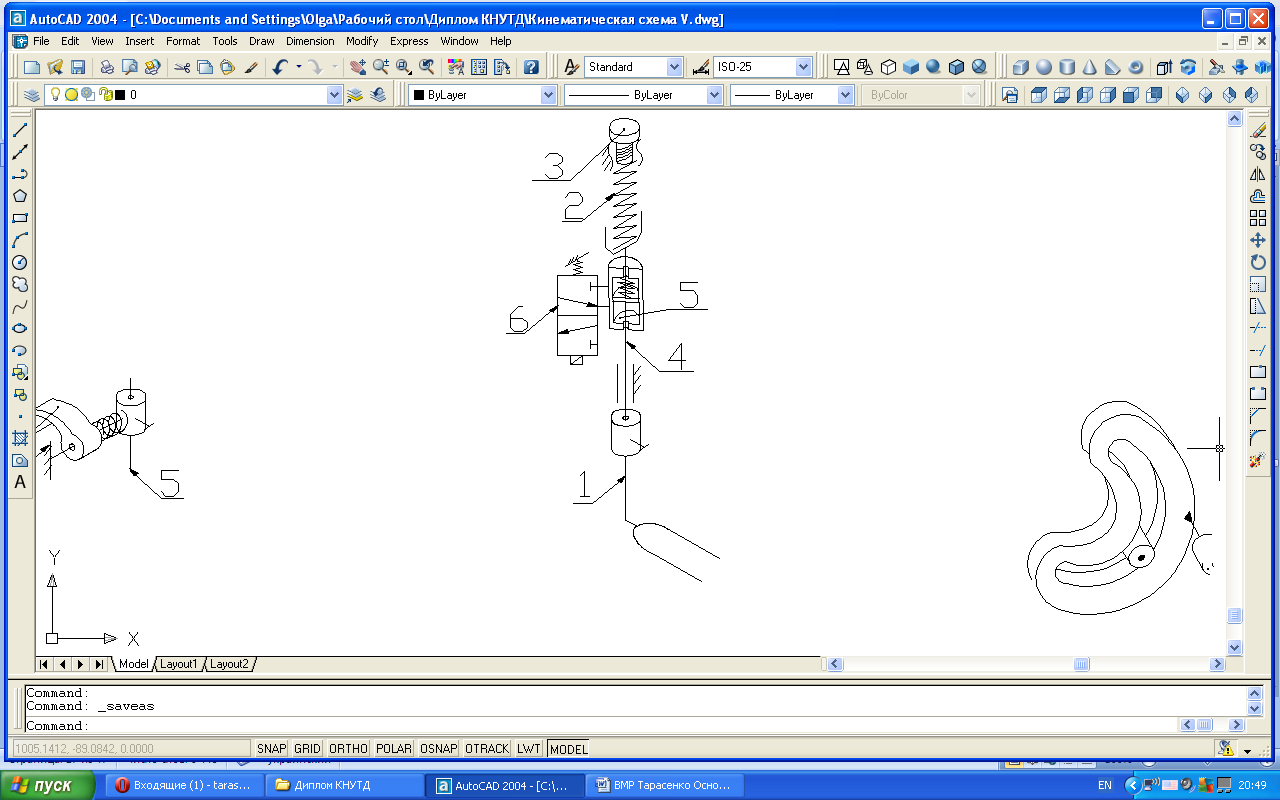
1-притискна лапка;
2-пружний елемент;
3-гвинт регулювання;
4-вертикальний стержень;
5-ПнЦ;
6-соленоїд з моностабільним керуванням;
Рис.2.6.1. Схема Механізму ПЛ на основі найпростішої
мехатронної системи керування
Дата добавления: 2015-08-26; просмотров: 74 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Механізм ПЛ на базі ШВМ Singer Futura | | | Механізм притискної лапки з керуванням важеля підйому на базі мехатроніки |