|
Читайте также: |
На нижних складах с грузооборотом более 250 тыс. м3 в год наиболее эффективным является технологический поток с поперечным перемещением деревьев и хлыстов. В настоящее время для такого производственного процесса созданы специальные установки, производящие разгрузку древесины, удаление сучьев, раскряжевку хлыстов (иногда раскряжевку сразу всей пачки), сортировку и другие операции. Наиболее важной из них является раскряжевка хлыстов.
Характерной положительной особенностью группового метода раскряжевки хлыстов является высокая производительность.раскряжевочных агрегатов. К числу недостатков следует отнести более низкий выход деловой древесины по сравнению с индивидуальным методом раскряжевки и сложную конструкцию агрегата. При работе на таких многопильных установках оператор испытывает значительные психологические нагрузки. Определяется это высоким ритмом работы агрегатов, вследствие чего значительно сокращается время на выбор наиболее оптимальной схемы раскряжевки хлыста (эта задача должна решаться сразу для всего хлыста, а не отдельной его части, как это имеет место при работе на однопильных агрегатах). Поэтому вопросам проектирования и создания многопильных агрегатов уделяется особое внимание с точки зрения как автоматизации технологических и транспортных операций, так и автоматизированного программирования раскряжевки хлыстов.
Анализируя ранее рассмотренные возможные схемы многопильных раскряжевочных агрегатов, можно сделать вывод, что главными факторами автоматизированного управления являются методы управления пилами и ориентацией хлыста относительно этих пил.
Управление пилами может быть выполнено двумя способами: включением определенной группы пил в работу или их расстановкой относительно раскряжевываемого хлыста. Это необходимо для выполнения условий рациональной раскряжевки. Дополнением к этим методам является предварительная ориентация хлыста относительно пил, что позволяет увеличить выход деловой древесины наилучшего качества.
Автоматическое управление включением группы пил. Наиболее простыми многопильными раскряжевочными агрегатами являются установки слешерного или триммерного типа с неподвижными пилами. Раскряжевка хлыстов на них производится только по одной схеме, что является существенным недостатком. Поэтому наиболее эффективными следует считать многопильные установки с пилами, которые вступают в работу группами. При этом различные комбинации включения пил делают возможным назначать различные схемы раскряжевки хлыстов.
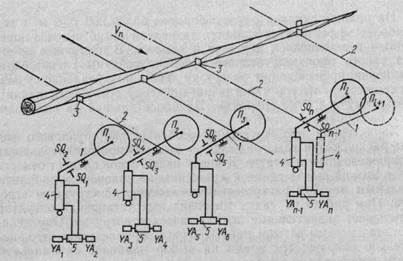
Рис. 14.8. Схема многопильного раскряжевочного агрегата
На рис. 14.8 приведена принципиальная кинематическая схема многопильного агрегата. Работа установки сводится к следующему. Оператор нажатием определенной кнопки выдает команду на подъем (включение) определенной комбинации пил П 1 .,.Пi (на рисунке пила 1, показанная пунктиром Пi+1, опущена). Хлыст упорами 3 поперечного транспортера 2 надвигается на поднятые пилы и распиливается на заданные отрезки сортиментов. Под.ем и опускание пил производятся гидроцилиндрами 4 (пневмоцилиндрами). Управление гидроцилиндрами осуществляется золотниками 5 от электромагнитов ΥΑ1...ΥΑn привода золотников. Условимся, что электромагниты ΥΑ1, ΥA3 и т. д. (нечетные) производят перемещение золотника на подъем пилы, а четные — на ее опускание. Схема раскряжевки хлыста определяется оператором, который воздействует на соответствующую кнопку пульта управления. Например, кнопка П 1 — первая схема, П2 — вторая схема и т. д. Тогда, учитывая это,
а также кратковременность действия кнопок (необходимо добавление элементов памяти), можно написать условия включения подъема пил и их выключения (опускания) для первой, второй и т. д. схем.
Условие подъема или опускания пил для любой программы будет f '=SBi + Ki, а условие выключения f"=SQi.
Математическая модель управления пилами для любой схемы раскряжевки имеет вид
Y 1 = Σ f ' f"F = Σ (SBi + Κi)SQiKi
где SBi — кнопка номера схемы раскряжевки хлыста; Кi — блокирующий контакт реле (элемент «памяти»); SQi — конечный выключатель, фиксирующий верхнее положение пилы; Кi — реле, выполняющее роль «памяти» и включения соответствующих электромагнитов на подъем пил.
Математическая модель управления исполнительными элементами (электромагнитами) в общем виде:
Y 2 = Σ f ' f"F = Σ ΚiΚi+1YAi
где Кi Ki+1 — контакты реле, включающие и выключающие электромагниты.
Пример. Требуется составить схему управления многопильной раскряжевочной установки при следующих схемах: 1-я—включаются пилы П 1, П 3, Пi; 2-я — включаются пилы П 1, П 2, Пi; 3-я — включаются пилы П 2, Пi.

Рис. 14.9. Схема автоматического управления многопильным раскряжевочным
агрегатом
Запишем условие подъема и, опускания.
По первой схеме раскряжевки:
подъем В 1 = ( SB1 + К1) SQ1K1;
опускание Н 1 = (SQ1 + К2)SQ2K2.
По второй схеме:
подъем B 2 = ( SB2+ K3) SQ3K3;
опускание Н 2= (SQ3 + К4)SQ4K4.
По третьей схеме:
подъем B 3 = (SB3+ Kn- 1 )SQn- 1K n- 1,
опускание Н 3 = (SQn- 1 + Kn) SQnKn.
По полученным логическим уравнениям составляем схему управления (рис. 14.9, а).
Аналогичным образом составляют логические уравнения управления электромагнитами золотников

Производя анализ полученных уравнений, видим, что их можно упростить на основе законов математических свойств логических функций:

По полученным логическим уравнениям составляем схему управления электромагнитами золотников (рис. 14.9, б).
Автоматическую схему управления пилами, выдвигаемыми в определенной комбинации, можно синтезировать и на бесконтактных логических элементах серии логика-И (И-101, И-105). Однако в этом случае схема бесконтактного шифратора получается довольно сложной. Более эффективным следует считать применение специального шифратора (элемента И-118).

Рис. 14.10. Схема шифратора на элементе И-118
В цифровых системах автоматики ручной ввод команды удобен в виде десятичных чисел, и в то же время обработка этих чисел более удобна в двоичной системе. Поэтому возникает необходимость преобразования десятичной системы счисления в двоичную. Логический элемент И-118 обеспечивает это преобразование, которое выполняется по принципу поразрядной шифра-ции. Этот элемент (рис. 14.10) преобразует десять десятичных чисел (0, 1... 9) в четырехразрядный двоичный код. Входами элемента являются выводы 1, 2, 3, 4, 5, 6, 7, 8, 9. Выходом элемента являются выводы 1', 2', 3', 4'. Эти выводы соответствуют разрядам двоичного кода 20: 21: 22: 23. Наличие на всех входах сигнала управления (логическая 1) соответствует десятичной цифре 0, при этом на выходе элементов формируется двоичный код 0000. При подаче на один из входов сигнала 0 на выходе элемента формируется двоичный код десятичного числа. На рис. 14.10 показана схема поразрядной шифрации трехразрядных десятичных чисел, количество которых позволяет управлять 12 пилами многопильной раскряжевочной установки.
Программа включения комбинации пил вводится тремя пакетными переключателями ПМП 102 (десятипозиционный переключатель). Переключателем SB1 управляется первая группа из четырех пил, SB2 — вторая группа из четырех пил и SB3 — третья группа. При повороте каждого переключателя в определенное положение на выходе элементов Д1, Д2 и ДЗ формируется двоичный код, который своим числом изображает номер включаемой пилы на подъем. Исходное положение всех переключателей нулевое, при этом на входах всех элементов Д1, Д2 и ДЗ устанавливаются сигналы 1. Например, нам необходимо из 12 пил включить 3 — 4 — 7— 10— 12.
Эта программа включения пил закодирована в десятичной системе числом 325. Устанавливая каждый переключатель в соответствующее положение SB1 (единицы) на 5-ю позицию, SB2 (десятки) на 2-ю позицию и SB3 (сотни) на 3-ю позицию, получаем закодированный сигнал управления 001100100101. Логиче-
екая 1 на выходе шифратора обозначает включение соответствующей пилы на подъем. К выходам шифраторов подключают усилители, которые управляют электромагнитами золотников гидроцилиндрами подъема и опускания пил. Выход команд управления пилами можно вывести на цифровое индикаторное табло через дешифратор И-116, где включаются соответствующие цифры газоразрядных ламп.
Автоматическое управление ориентацией хлыста перед раскряжевкой. Значительное увеличение выхода деловой древесины при раскряжевке на многопильных установках можно по-
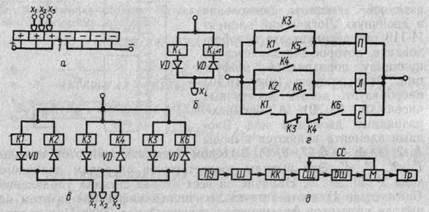
Рис. 14.11. Ориентация хлыста с кодовым коллектором
лучить, предварительно ориентировав хлыст относительно пил. В этом случае наиболее просто и надежно можно произвести отделение деловой древесины хлыста от его фаутной части.
Продольное перемещение хлыста производится транспортером на требуемую величину, которая определяется оператором, после чего хлыст раскряжевывается по заданной программе.
Перемещение хлыста с транспортером можно осуществить различными задающими и отрабатывающими системами (следящими системами), например следящей системой на сельсинах и другими способами.
Рассмотрим дискретную следящую систему на базе кодового коллектора (рис. 14.11,а).
Ламели кодового коллектора с пульта управления могут быть подключены оператором к (+) или (—) потенциалу. При этом граница перехода потенциала с (+) на (—) (точка 1) определяет величину перемещения ориентирующего продольного транспортера. Считывающие щетки х 1, х 2, x 3 служат для считывания полярности потенциала и передачи информации
Таблица 14.1
| x 1 | x 2 | x 3 | П | Л | С |
| + | + | + | |||
| + | + | ||||
| + | + | ||||
| + | + | ||||
| + | + | - | |||
| + | — | ||||
| _ | - | - | |||
| — | — | ||||
| — | — | ||||
| — | — | ||||
| — | — | + |
(сигналов) в дешифратор, который определяет (включает) направление вращения двигателя в сторону адреса места вызова (точка 1). Для написания математической модели управления ориентирующим транспортером составим таблицу состояний комбинаций считываемых сигналов при перемещении щеток вправо Π и влево Л к точке 1 (табл. 14.1).
Очевидно, что при положении щеток левее точки 1, возможные комбинации считываемых сигналов будут иметь вид, показанный в верхней половине таблицы. При этом транспортер с хлыстом должен двигаться вправо П, что обозначено символом 1. Если щетки будут считывать сигналы с ламелей коллектора, показанных в нижней половине таблицы, то движение транспортера, очевидно, должно быть влево Л (обозначено символом 1), если же щетки произведут считывание сигнала (+) 0 (—), то в этом случае транспортер должен остановиться (стоп, символ 1), так как он переместился на заданную величину в адрес своего вызова (точка 1).
Следовательно, можно написать математическую модель управления транспортером.
Очевидно, что уравнения движения будут иметь вид: вправо

влево

стоп

где xi' —отрицательный потенциал (i= 1, 2, 3).
Преобразовав полученные логические уравнения, получим окончательно:
П = x 2+ x 1 x 3;
Л = х 2 '+х1'x3'
C=x 1 x 2 x 3 '
Для считывания сигнала различной полярности потребуется элемент, который бы реагировал на эту полярность. Таким элементом может быть реле с диодом (см. рис. 14.11, б). При считывании щеткой xi (+) потенциала срабатывает реле Ki+ 1 а при считывании (—) потенциала — реле Κi. Общая схема такого дешифрирующего устройства приведена на рис. 14.11, в.
Перепишем полученные уравнения с использованием реальных элементов:
П=х2+х1х3 = К3+К1K5;
Л=х2'+х1' = К4 + К2К6; С=х 1 х 2 х 3 '=К1(КЗК4)К6.
По полученным уравнениям составляется схема управления электродвигателем ориентирующего транспортера: П — пускатель двигателя вправо, Л — влево, С — стоп (тормозная система) (см. рис. 14.11,г).
Блок-схема рассмотренной системы заказа перемещения ориентирующего транспортера показана на рис. 14.11,5. Заказ адреса места вызова задается оператором с пульта управления ПУ; при помощи шифратора Ш ламели кодового коллектора КК подключаются к (+) и (—) потенциалу. Считывание сигналов производится щетками СЩ; дешифратор ДШ в зависимости от считываемых сигналов подключает двигатель Μ в соответствующее направление вращения, при этом через синхронную связь СС идет перемещение щеток в сторону адреса места вызова транспортера Тр (хлыста).
Автоматическое управление перемещением пил многопильной установки. Одной из важных задач, связанных с созданием многопильных раскряжевочных агрегатов, является разработка автоматизированной системы управления перемещением пил. Главными факторами, определяющими эффективность системы, является выход деловой древесины и точность выпиливаемых длин сортиментов. Выполнение первого условия возможно при перемещении пил в любое нужное положение, а второго— в точной остановке пилы в заданном месте. Производя выпиливание дискретных значений длин сортиментов, система перемещения пил должна иметь также дискретную характеристику, например перемещение пилы можно фиксировать опре-
деленным числом импульсов, каждый из которых соответствует определенной длине пути ее перемещения или другим способом. Наиболее перспективным способом управления расстановкой пил является способ расстановки пил при помощи цифровой системы. Принцип работы такой системы состоит в том, что положение пилы Π и положение адреса А места вызова пилы изображаются двоичным числом X и Y. При этом сравнение этих чисел определяет направление движения пилы к месту адреса вызова. В этом случае путь, по которому перемещается пила, будет являться числовой осью. Очевидно, что шаг Δ чис-

Рис. 14.12. Релейная схема управления перемещением пил
ловой оси определяется требуемой точностью остановки пилы (рис. 14.12, а).
Для определения значения этих чисел, очевидно, необходимо иметь соответствующее устройство их сравнения. Эту функцию может выполнять специальный блок — сравнения. При этом он должен выполнять следующие логические условия (рис. 14.12, а):
если х>у, то подается команда на движение влево (рис. 14.12, б);
если х<у, то подается команда на движение вправо; если x = 0, то подается команда — стоп.
Такое сравнение чисел должно производиться последовательно по разрядам двоичных чисел с высшего разряда к низшему. Например, пусть имеется следующая таблица, изображающая двоичными числами положение пилы П(х) и положение адреса места вызова А (у).
| Разряды | |||
| Число х | |||
| Число у |
Сравнение этих чисел x и у по высшему третьему разряду определяет, что у= 1, а x =0. Следовательно, у>х, т. е. задается команда на движение вправо. При движении пилы вправо изменяется через цифровой датчик перемещения пилы число x в сторону его увеличения к числу у и как только в третьем разряде х=у, т. е. х= 1, сравнение чисел должно начинаться во втором разряде и т. д. Таким образом, алгоритм, по которому должен действовать блок сравнения чисел, должен реализовать условия: если х = 0, а у= 1 (у>х), то движение вправо; если х= 1, а у= 0 (х>у), то движение влево; если х= 1 и у= 1 или x =0 и у= 0, то подается команда стоп, т. е. пила прибыла в точку адреса места вызова А (см. рис. 14.12, а).
Учитывая эти условия, можно составить математическую модель выбора направления движения для пилы, принимая при этом следующие значения двоичных чисел: если считыва-ется логическая 1, то это ее значение записывается как х, а если считывается 0, то его значение записывается как х. Аналогично записывается и у. Таким образом, будем иметь:
при х>у, т. е. х= 1, а y =0, тогда (ху) соответствует движению пилы влево;
при х<у, т. е. х= 0, а у= 1, тогда ху соответствует движению пилы вправо;
при х=у (х= 1 и y =1 или х= 0 и у= 0 ), тогда ху+(ху) соответствует остановке пилы, так как она прибыла в точку адреса места вызова А.
По полученной математической модели и реализуется схема управления движениями пилы (рис. 14.12,(5). Верхняя часть схемы представляет собой переключающие устройства x и у, а нижняя X и Y значения двоичного числа, которое изображает положение пилы X и адрес места вызова пилы Υ. Таким образом, если считывается Υ 1 = 1, а X 1 = 0 (х<у), то включается

Рис. 14.13. Бесконтактная схема управления расстановкой пил

Рис. 14.14. Схемы управления перемещением пил при помощи вычислительных устройств
нижняя цепь управления и включается команда на движение влево Вл, и наоборот. При равенстве чисел X 1 = Y 1, сравнение чисел начинается в следующем низшем разряде по центральной цепи, т. е. сравниваются уж Х2 и Y 2 и т. д.
Такое сравнение чисел; ожно производить и на бесконтактных элементах, например на И-103. Заметим, что полученные логические уравнения (ху) и ху реализуют так называемую функцию «запрет». Учитывая это, можно систематизировать бесконтактную схему управления выбором направления движения пилы (рис. 14.13).
Сравнение двоичных чисел можно производить и на специальном логическом элементе И-119, представляющем собой нуль-орган.
На рис. 14.14, а показана схема такого сравнения.
На входы элементов И-119 (D1; D2; D3 и D4) подаются разряды сравниваемых чисел x и у. Старший разряд этого числа подается на первый элемент D1, а младший на D4. Элементы D1...D4 соединяются между собой, как показано на рисунке. При таком соединении на выходе 7 появляется логическая 1 при х>у, а на выходе 9 х<у. При равенстве х = у на выходе 8 появляется логическая единица. Для определения общего конечного результата сравнения используются выходные элементы (D7) И-105 (D5, D6) и элемент —И-102.
Управление расстановкой пил можно производить и на базе микропроцессора с использованием для этой цели его арифметико-логического устройства (АЛУ). На рис. 14.14, б приведена структурная схема такого АЛУ. Регистры x и у служат для приема и хранения двоичных чисел, которые изображают место положения пилы Π и адрес ее вызова А. Операционный блок производит сравнение этих чисел и выдает команду в блок управления на начало движения пилы в сторону адреса места вызова. При своем движении изменяется двоичное число x в сторону х=→у и, как только эти числа сравняются (х = у), функционирование системы прекращается. Регистр С служит для хранения результата сравнения чисел в операционном блоке и передает этот результат в регистр РР, откуда он используется для очередного вычисления (сравнения). Значения команд для начала выполнения перемещения подаются в оперативную память АЛУ.
Дата добавления: 2015-08-27; просмотров: 179 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| СТОЛ ОТМЕРА ДЛИН СОРТИМЕНТОВ | | | МНОГОПИЛЬНЫЕ ПОЛУАВТОМАТИЧЕСКИЕ УСТАНОВКИ |