|
Читайте также: |
После пачковой разгрузки хлыстов или деревьев эту пачку необходимо разобрать для поштучной подачи на следующую технологическую операцию (обрезку сучьев, раскряжевку). Эту работу выполняют специальные разборщики.
Все разборщики можно классифицировать на разборщики группового рассредоточения хлыстов и разборщики с поштуч-

Рис. 13.4. Разборщики группового рассредоточения
ным отделением хлыстов или деревьев. В первом случае весь пакет хлыстов постепенно рассредоточивается в поперечную щеть, во втором разборка производится поштучным отделением хлыстов или деревьев из пачки.
Разборщики группового рассредоточения. На рис. 13.4 приведены некоторые схемы разборщиков группового рассредоточения хлыстов.
Одним из полностью автоматизированных является фрикционный разборщик хлыстов (рис. 13.4, а). Пачка хлыстов раз-
гружается на первую секцию поперечного транспортера и начинает перемещаться, в момент перехода пачки с одной секции на другую происходит отрыв нескольких хлыстов из общей пачки, так как скорость транспортера последующей пачки выше, чем у предыдущей, т. е. v 1< v 2< v 3 и т. д. Далее эта группа хлыстов опять рассредоточивается на следующем переходе и т. д.
На рис. 13.4, б приведена схема разборщика хлыстов (сортиментов) с неподвижной гребенкой 3 и перемещающимися с поперечным транспортером 5 кулачками 2. При включении

Рис. 13.5. Схема разборки хлыстов
транспортера кулачки захватывают из пачки 1 очередной хлыст и начинают его перемещение по гребенке З, которая образует своеобразные ячейки для разделения хлыстов друг от друга. Высота кулачков выше, чем высота гребенки. Таким образом хлыст перемещается вверх по гребенке на продольный транспортер 4. Наклонная плоскость гребенки обеспечивает надежное разделение двух лежащих рядом хлыстов, а также устраняет их перекос при движении, так как перекошенные хлысты (сортименты) скатываются вниз в ячейку и выравниваются. По этому принципу работают разборщики ТЛХ-80 и ТЛ-80 (для сортиментов).
На рис. 13.4, в приведена схема винтового разборщика и на рис. 13.5, г вибрационного.
Главными параметрами фрикционного разборщика являются: общее передаточное отношение транспортеров; передаточное отношение между смежными секциями; число секций.
Определение общего передаточного отношения (рис. 13.5) ведется из условия заданного интервала между хлыстами λ на последней секции. Разборка пачки будет осуществлена, если
общее передаточное отношение будет i0 = vn / v 1= L / l где l — длина основания пачки до разборки; L — длина разобранной
На рис. 13.5 приведена схема разборки. Принимая λ = ε d, где ε — коэффициент растаскивания, можно написать, что
L = N λ = N ε d,
где N — количество хлыстов в пачке.
Длину основания пачки до разборки определяем следующим образом.
Площадь торцов древесины в пачке будет

С другой стороны, если принять сечение пачки за треугольник, эта площадь будет

где μ — коэффициент полнодревесности. Приравнивая эти выражения, получим

Откуда

Теперь определим общее передаточное отношение:
Передаточное отношение между двумя секциями, очевидно, будет

Определим необходимое количество секций транспортера. Оно составит

Пример. Пусть объем пачки составляет 30 м3. Примем объем одного хлыста q=0,4 м3. Тогда количество хлыстов составит
N =30/0,4 = 75 шт.
Примем угол естественного откоса α = 40°; коэффициент полнодревесности μ = 0,6; коэффициент растаскивания ε = 2. Тогда общее передаточное отношение будет

Принимая передаточное отношение между секциями одинаковым, будем иметь i ≥ε = 2.
Потребное количество секций составит
n =i 0 /i + 1 = 6,9/2 + 1 = 4,45.
Принимаем 5 секций.
Одним из существенных недостатков таких фрикционных многосекционных разборщиков является возможный перекос хлыстов. Автоматическое управление выравниванием хлыстов

Рис. 13.6. Автоматическое выравнивание хлыстов
можно осуществить двумя упорами У (рис. 13.6, а), которые убираются электромагнитом УА (рис. 13.6, г), если оба конца хлыста (вершинный и комлевый) будут находиться у упоров. Фиксация этого положения производится двумя конечными выключателями SQ1 и SQ2. Очевидно, что событие срабатывания электромагнита (событие уборки упоров) будет только в том случае, если сработает SQ1 и SQ2. Обозначив это событие через А, можно написать следующее логическое уравнение
A = SQ1SQ2УA.
Электрическая схема в этом случае будет иметь два последовательно включенных конечных выключателя SQ1 и SQ2 в цепь катушки электромагнита УА (рис. 13.6, б).
Заметим, что все рассмотренные разборщики рассредоточения можно применять только на разборке хлыстов или сортиментов.
Разборщики поштучного отделения, кран-манипулятор. В качестве разборщиков для поштучного отделения хлыстов (деревьев) применяют различные крановые установки. Они требуют применения ручного труда на застропке грузов.
К механизмам, позволяющим полностью исключить ручной труд на разгрузке и разборке пачки, относится кран-манипулятор. В настоящее время на лесных складах применяют различные конструкции таких манипуляторов.
Кран представляет собой конструкцию на базе гидрофици-рованного экскаватора. Он входит в комплект сучкорезных линий.
Оператор управляет краном из кабины. Управление гидроцилиндрами производится золотниками, которые включает и выключает оператор при помощи рукояток. В процессе работы оператор стремится задать как минимум два одновременных движения крану (стреле, захвату). В противном случае производительность крана будет низка. При такой сложной координации движений крана неизбежна быстрая утомляемость опе-

Рис. 13.7. Кран-манипулятор с следящей системой
ратора. Поэтому с точки зрения автоматизации движения отдельных элементов крана наиболее перспективным следует считать применение автоматизированной следящей системы манипулятора. Сущность этой системы заключается в том, что механическая рука крана-манипулятора копирует движение масштабной рукоятки оператора.
Как видно из рис. 13.7, гидроманипулятор состоит из механической системы, включающей в себя стрелу 4, рукоять 2 с захватом 1. Привод этих конструктивных элементов произ-
водится гидроцилиндрами 3, которые в свою очередь управляются золотниками 5. Управление золотниками производится, пропорциональными электромагнитами ΥA1 и ΥA2 (на рис. 13.7, а показаны только два электромагнита управления золотника гидроцилиндра привода стрелы).
Управление манипуляторами типа ЛО-13С производится рукоятками золотников, которые расположены на пульте в кабине оператора. Движение элементов системы задается оператором включением соответствующих рукояток золотников. Для точного наведения захвата на дерево (хлыст) оператору при существующем способе управления (включено-выключено) приходится производить многократные переключения золотников, что увеличивает время рабочего цикла и, как следствие, снижает производительность гидроманипулятора. Следует отметить, что эти многократные переключения отрицательно сказываются на психологических нагрузках рабочего и механической прочности гидросистемы в целом из-за гидравлических ударов, которые испытывает вся гидросистема.
Для того чтобы система совершила задаваемое движение по оптимальной траектории, необходимо, чтобы в любой момент времени расход жидкости, поступающей в гидроцилиндры, имел строго определенное значение. Фактически оператору это не удается сделать, и система в целом перемещается в пространстве по далеко не оптимальной траектории.
Решение проблемы оптимального движения стрелы и рукояти с захватом можно решать только при помощи следящей системы, принцип работы которой состоит в том, что механическая система, отрабатывает строго определенное положение, задаваемое масштабной рукояткой оператора 2', 3' (рис., 13.7, а). Сравнение положения масштабной рукоятки и механической системы производится потенциометрической следящей системой (рис. 13.7, б), состоящей из кольцевых потенциометров датчиков и приемников (на рисунке показаны линейные изображения потенциометров). Работу следящей системы рассмотрим на примере движения одной стрелы 4 и рычага 4' масштабной рукоятки. Задавая положение рычага 4' (см. рис. 13.7, а) на угол α1 ползунок потенциометра RPG1 занимает определенное положение α1 (см. рис. 13.7, б). Положение стрелы 4 (рис. 13.7, а) определяется произвольным углом α2, при котором ползунок потенциометра приемника также находится в произвольном положении α2 (см. рис. 13.7, б). На выходе сравнивающего устройства образуется разность потенциалов Δ U определенной полярности. Магнитный усилитель 6 (см. рис. 13.7, а), реагируя на эту полярность сигнала, включает.соответствующий пропорциональный электромагнит ΥA1 или ΥΑ2, который воздействует на золотник. Золотник, перемещаясь, подключает определенную полость гидроцилиндра, и он
своим штоком начинает перемещать стрелу 4 в сторону устранения ошибки рассогласования таким образом, чтобы α2 → α1. Как только α2 = α1 (рис. 13.7, в), разность потенциалов Δ U = 0, электромагниты обесточатся, золотник займет нейтральное положение и система остановится, отработав задаваемое положение в пространстве. Одновременно аналогичным образом управляются и рукоять 2 с захватом 1 (см. рис. 13.7, а), т. е. задающие потенциометры RPG2 и RPG3 имеют такую же схему включения с потенциометрами-приемниками RPE2 и RPE3. При этом система останавливается при α1 = α2, β1 = β2 и γ1=γ2·
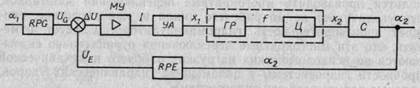
Рис. 13.8. Блок-схема следящей системы
Таким образом, вместо нескольких рукояток управления золотниками только одной масштабной рукояткой 2', 4' производится управление всей механической системой.
Рассмотрим динамические свойства следящей системы.
Блок-схема следящей потенциометрической системы с входными и выходными сигналами приведена на рис. 13.8. Составим уравнения звеньев и определим их передаточные функции.
1. Выходное напряжение задающего потенциометра RPG1 будет равно (см. рис. 13.7,6).
U 1 = k 1α1, соответственно на выходе RPE1 U 2= k 1α2, а общее выходное напряжение составит
Δ U = U 1 — U 2 = k 1 ( α1—α2) = k 1Δα. Следовательно, передаточная функция будет
W 1(P)= k 1
2. Передаточная функция магнитного усилителя МУ в простейшем виде будет

где T 2 — постоянная времени обмотки управления.
3. Уравнение пропорционального электромагнита УA с пру-
жиной и якорем представляет собой колебательное звено, передаточная функция которого имеет вид:

где Т 3 — постоянная времени электромагнита; ξ — коэффициент демпфирования.
4. Гидроцилиндр Ц с золотником ГР (см. рис. 13.8) в идеальном случае представляют собой интегрирующее звено, передаточная функция которого имеет вид

5. Стрела С гидроманипулятора при перемещении штока гидроцилиндра будет поворачиваться на угол α2. Очевидно, что α2 = k 5 x2, где x 2 — перемещение штока. Тогда передаточная
функция будет
W 5 (P) = k 5.
Известно, что общая передаточная функция всей разомкнутой системы определяется как Wp(P)=ПWi(P), в нашем случае будем иметь:

или

где k 0 = k 1 k 2 k 3 k 4 k 5.
Уравнение передаточной функции для замкнутой системы с отрицательной обратной связью имеет вид


Характеристическое уравнение соответственно будет

Это уравнение и используется для определения устойчивости следящей системы гидроманипулятора.
Дата добавления: 2015-08-27; просмотров: 141 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ НА РАЗГРУЗКЕ ХЛЫСТОВ (ДЕРЕВЬЕВ) | | | ЛЕСОНАКОПИТЕЛИ |