Читайте также:
|
Многооперационные машины, применяемые на лесосечных работах для валки леса, оснащены цепными пильными устройствами консольного типа, что позволяет спиливать деревья у комля значительных диаметров (до 100 см). Одним из основных параметров пильного аппарата является величина скорости надвигания, так как чем выше эта скорость, тем выше производительность.
Однако увеличение скорости надвигания ведет к увеличению потребной мощности резания, что в свою очередь приводит к увеличению габарита пильного аппарата, усложнению механизма резания и т. д. Поэтому потребную мощность резания
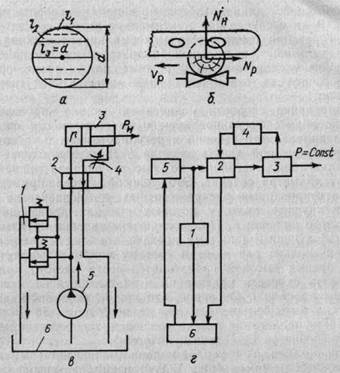
Рис. 12.9. Регулирование скорости надвигания
ограничивают в определенных пределах с учетом максимально возможной его загрузки, т. е.

Мощность резания можно определять как

где k — коэффициент пропорциональности; F — производительность чистого пиления, см2/с;

где υ H — скорость надвигания пильного аппарата, м/с; l — мгновенная длина распила, м.
При распиловке круглых лесоматериалов мгновенная длина распила l является переменной (рис. 12.9, а) величиной. В начальный момент она минимальна, а в среднем положении равна диаметру сортимента. Таким образом, для того, чтобы мощность резания была постоянной по всей высоте пропила
при изменяющейся длине, необходимо изменять скорость надвигания υ H. В этом случае при максимально возможной загрузке двигателя резания имеет место максимально возможная скорость надвигания, т. е. пильный аппарат работает в наиболее оптимальном эксплуатационном режиме как с точки зрения загрузки двигателя, так и возможной максимальной скорости надвигания.
Регулирование скорости надвигания можно производить двумя способами: регулированием υ H в зависимости от диаметра распиливаемого сечения и регулированием υ H в зависимости от мгновенной длины распила l. В первом случае скорость надвигания постоянна по высоте распила и зависит только от диаметра сечения. Этот способ нашел применение в автоматизированных раскряжевочных установках, где применяются круглые пилы, у которых высокая производительность чистого пиления F. При поперечном пилении круглых лесоматериалов цепными пилами производительность чистого пиления в несколько раз ниже и поэтому наиболее эффективно с точки зрения высокой производительности чистого пиления регулировать скорость надвигания в зависимости от мгновенной длины распила l. Очевидно, что при l 1, скорость надвигания должна быть больше, чем при длине l 2 и так до l 3 = d, затем скорость надвигания можно увеличить, так как длина распила l уменьшается (показано пунктиром).
Усилие резания Np и усилие подачи (надвигания) NH в эксплуатационных режимах (рис. 12.9, б) взаимозависимы, как

где k — коэффициент, зависящий от угловых параметров зубьев (k = 0,8...1,2). Это примерное постоянство вызвано тем, что усилие резания N p и усилие подачи (надвигания) N H связаны с толщиной снимаемой стружки примерно одними и теми же зависимостями.
С другой стороны, потребная мощность резания определяется как

где υ Ρ — скорость резания, м/с.
Подставляя значение N p, получим, что
Очевидно, что при NH = const (скорость резания постоянная величина, υ p — const) мощность резания будет также постоянной, т. е. P p = const. Тогда выражение P p = kF = k υH l должно быть постоянной величиной, т. е. P p = k υ Hl = const.
Таким образом, при постоянной величине усилия подачи (надвигания) обеспечивается возможно-максимальное значение скорости надвигания υΗ и как следствие максимальная производительность пиления.
Постоянную величину усилия подачи можно осуществить, например, при помощи гидроцилиндра 3 (рис. 12.9, в) привода механизма надвигания пильного аппарата многооперационной машины. Условие, когда усилие на штоке гидроцилиндра надвигания должно быть постоянным (Р H = const), возможно, если давление в поршневой части цилиндра тоже p = const. Это условие можно реализовать показанной гидравлической схемой (рис. 12.9, в).
При рабочем ходе (надвигание пильного аппарата) жидкость от насоса 5 через гидрораспределитель 2 поступает к гид-дроцилиндру 3, а через дроссель 4 на слив в бак 6. Напорный клапан непрямого действия 1 выполняет функцию переливного, так как через него в бак 6 сливается часть жидкости: Δ Q = = Q h— Q дв, где Q H— подача насоса; Q ДВ — расход гидроцилиндра.
Дроссель 4, установленный у выхода гидроцилиндра создает подпор, обеспечивающий плавное строгивание штока при рабочем ходе. Напорный клапан непрямого действия 1 при помощи корректирующих пружин настраивается таким образом, что при увеличении давления p в рабочей полости гидроцилиндра он открывается и часть жидкости Δ Q сливается в бак 6, при этом давление стабилизируется до номинального значения р. Это происходит потому, что напорный клапан 1 имеет внутреннюю положительную обратную связь по капиллярному каналу, в результате, чем больше рабочее давление превосходит свое номинальное значение, тем в большем количестве происходит слив жидкости Δ Q в бак. Это обеспечивает клапану стабильную характеристику, т. е. p = f( Δ Q) =const, благодаря чему, при изменении расхода гидроцилиндра 3, вызванного изменением нагрузки Np (при l 1; l2; l 3 и т. д.) давление, развиваемое насосом 5, а, следовательно, и давление в рабочей полости гидроцилиндра остаются практически постоянными, т. е. усилие на штоке гидроцилиндра (усилие надвигания) Ρ = const. Следует отметить, что рассмотренная автоматическая система является разомкнутой, блок-схема которой показана на рис. 12.9, г.
Для определения динамических свойств такой системы необходимо исследовать график переходного процесса соответствующего способа регулирования мощности двигателя резания. Предположим, что в начальный момент резания мгновенная длина распила l = 0 (при t<0), а при t>0 (рис. 12.10) длина пропила скачкообразно изменяется до значения l= 1. Это условие соответствует единичной скачкообразной функции при
теоретическом исследовании устойчивости систем автоматического регулирования.
Очевидно, что усилие надвигания N H можно определить как
где т — приведенная масса подвижных частей пильного аппа-
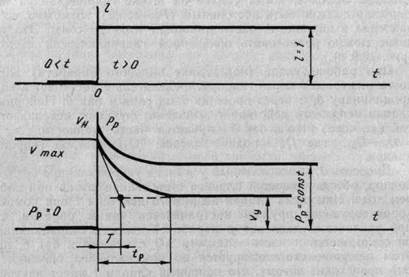
Рис. 12.10. Графики переходных процессов при пилении
рата; υΗ — скорость надвигания; N — усилие сопротивления подачи (реакция).
Перепишем уравнение в виде
Можно считать, что работа резания А, Н•м/см2, есть величина постоянная, тогда мощность резания составит Ρ p = Ν pυp или P p = A υH l, а с учетом, что

окончательно будем иметь, что
где υy — установившаяся скорость надвигания; υ — значение скорости надвигания; υp — скорость резания.
Решением полученного дифференциального уравнения будет уравнение экспоненты вида
Произвольную постоянную С можно определить из начальных условий при t = 0, при котором υ H= υmax, тогда С =
= υmax — υ y. Подставляя это значение, окончательно будем иметь

Соответственно и мощность резания будет (P p =k υН l)

На рис. 12.10 приведены характеристики υH и Р р в функции времени t. Анализируя графики, видим, что при t<0 скорость надвигания имеет значение υmax, а при t→∞ υH = υy Соответственно изменяется и мощность резания от Р р = 0 при t <0, когда l = 0, и при скачкообразном изменении мгновенной длины распила l мощность резания тоже скачкообразно достигает своего максимального значения P max при t=0, а затем снижается до установившегося значения Р р = const при t →∞. Постоянная времени этого переходного процесса определяется как

Следовательно, для уменьшения времени Τ (соответственно уменьшения времени переходного процесса всей системы) желательно уменьшать массу пильного аппарата т. Значение максимальной скорости надвигания V max можно определить из возможно допустимого максимального усилия резания N р(max), которое определяется в основном прочностью пильной цепи, т. е.
Дата добавления: 2015-08-27; просмотров: 129 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| АВТОМАТИЧЕСКАЯ СТАБИЛИЗАЦИЯ ВЕРТИКАЛЬНОГО (ГОРИЗОНТАЛЬНОГО) ПОЛОЖЕНИЯ ЗАХВАТНО-СРЕЗАЮЩЕГО УСТРОЙСТВА | | | РЕГУЛИРОВАНИЕ СКОРОСТИ ПРОТАСКИВАНИЯ ДЕРЕВЬЕВ ЛЕСОСЕЧНЫХ СУЧКОРЕЗНЫХ МАШИН |