|
Читайте также: |
Имеют широкие возможности для построения разнообразных систем управления промышленными роботами. Здесь используется микроЭВМ «Электроника-С5», «Электроника НЦ», «Элек-троника-60». Чаще всего применяется «Электроника-60», созданная на базе микропроцессорного комплекта К581. Аппаратно и программно совместимы с ним микропроцессорные комплекты серий К588 и К1801. Комплект серии K1801 обладает высокой степенью интеграции (до 300 000 элементов в кристалле), по сравнению с другими однокристальными микропроцессорами
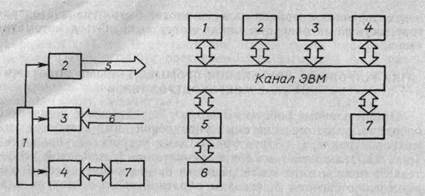
Рис. 11.7. Структурная схема устройства управления ПР на базе микроконтроллеров
Рис. 11.8. Структура блока обработки сенсорной информации на основе микропроцессорного комплекта К1801
имеет более высокое быстродействие (до 500 000 операций/с).
Система команд комплекта К1801 обеспечивает возможность использования программного обеспечения СМ ЭВМ и микроЭВМ «Электроника-79», «Электроника 100/25», «Электро-ника-60». Комплект оснащен унифицированным интерфейсом.
Структура блока обработки сенсорной информации, выполненного на основе комплекта К1801, показана на рис. 11.8. Блок центрального процессора 1 реализован на однокристальном микропроцессоре 1801 ВМ1 и производит необходимые вычисления и адресацию всех остальных блоков. В состав блока входят тактовый генератор, блок ПЗУ, блок шинных формирователей. Оперативное запоминающее устройство 2 реализовано на микросхемах К565РУ2, имеет объем памяти 2К × 16 и предназначено для записи промежуточных результатов. Запоминающее устройство управляющих программ 3 выполнено на микросхемах К573РУ2, имеет объем памяти 2К×16. Блок функциональных преобразователей 4 выполняет операции быстрого умножения и вычисляет стандартные функции, необходимые для реализации конкретного алгоритма обработки сенсорной информации датчиков. Интерфейс связи 5 предназначен для согласования с блоком управления 6 исполнительных механизмов робота.
Интерфейс ввода-вывода 7 служит для увеличения числа одновременно обслуживаемых устройств, позволяет передавать и записывать информацию с четырех раздельных портов ввода-вывода.
Рассмотренное устройство управления ПР и подобное ему на базе последующих микропроцессорных комплектов, очевидно, представляет интерес для оснащения роботов круглопильных шпалорезных станков и ленточнопильных станков распиловки крупномерных бревен.
Дата добавления: 2015-08-27; просмотров: 163 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| УСТРОЙСТВА УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМИ РОБОТАМИ НА БАЗЕ МИКРОКОНТРОЛЛЕРОВ | | | ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ РОБОТОВ, УПРАВЛЯЕМЫХ ЭВМ |