Читайте также:
|
Циклограмма является переходной графической моделью объекта. Она представляет собой совокупность горизонтальных отрезков (тактов), которые изображают продолжительность и очередность работы элементов системы. Наименование самих элементов обозначают в левой колонке циклограммы
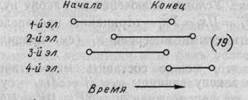
Продолжительность работы элемента характеризуется длиной отрезка от начала до конца, а очередность взаимным расположением отрезков. Как видно из приведенной циклограммы, первым начинает работать 1-й элемент, затем 3-й, 2-й и последним 4-й. Заметим также, что имеет место и одновременная работа элементов.
Взаимосвязь между элементами изображается стрелкой
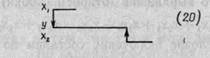
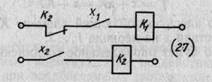
Здесь x 1 и х2 сигналы управления воздействуют на элемент у (исполнительный элемент). При воздействии x 1 происходит включение у, а при воздействии х2 выключение у.
Условие включения и выключения элементов. Обозначим условие включения элементов через f', а условие выключения через f". Рассмотрим возможные варианты этих условий.
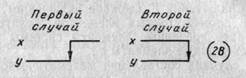
Условием включения исполнительного элемента у является входной сигнал управления х, при появлении которого включается цепь управления. При этом могут быть два случая:
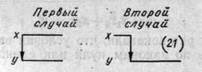
Здесь f'=x, т. е. у=х. Здесь f' =x, т. е. у=х.
Условия включения могут быть достаточными, недостаточными и избыточными.
Как показано выше, на циклограммах эти условия включения достаточны, потому что входной сигнал χ не меняет своего состояния на всем периоде работы элемента у (у=х) и
y=х).
При недостаточном условии включения включающий
элемент χ изменяет свое состояние на периоде 1...2 включения у.
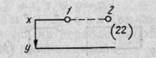
Очевидно, что на этом периоде 1...2 необходимо дополнительное условие включения, иначе у выключится, а это недопустимо. Таким дополнительным элементом для включения может быть, например, контакт реле К. Тогда циклограмма будет иметь вид
Здесь x непосредственно воздействует на К, а К уже включает у. Мы видим, что условие включения дополняется К. Тогда это условие на всем периоде работы у запишется как

Заметим, что здесь включающий элемент К имитирует «память» при отсутствии x на периоде 1...2.
На схеме это будет параллельное соединение контактов
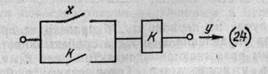
При кратковременном включении x срабатывает реле K, которое остается включенным своим контактом К, когда x и разомкнет цепь управления у.
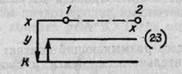
При избыточном условии включения включающий элемент χ появляется на периоде 1...2, когда исполнительный элемент у должен быть выключен.
Очевидно, что здесь на периоде 1...2 необходимо введение выключающего элемента, чтобы предотвратить ложное включение у. Таким выключающим элементом также может быть, например, размыкающий контакт реле К. Тогда циклограмма будет иметь вид
Напишем условие не включения элемента у на периоде а...б:

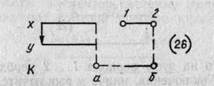
Заметим, что здесь размыкающий контакт реле К блокирует включение исполнительного элемента у своим размыкающим контактом К. На схеме это будет последовательное включение дополнительного размыкающего контакта К2 другого промежуточного реле K2, которое срабатывает от другого сигнала управления х2 на периоде а... б:
В этом случае на периоде а...б происходит срабатывание двух сигналов управления х1 и K2, а срабатывание реле К2 отключает своим размыкающим контактом реле K1 т. е. ложное срабатывание у исключается. Такое взаимное блокирование реле широко используется при синтезе схем управления.
Условием выключения исполнительного элемента у является входной сигнал — управления х, при котором цепь управления выключается.
Условия выключения могут быть достаточными и избыточными.
При достаточном условии включения входной выключающий сигнал x не меняет своего состояния на всем периоде работы у, что видно из циклограмм.
Здесь f"=x, т. е. у=х; f "= x, т. е. у=х.
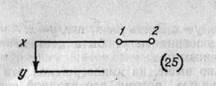
При избыточном условии выключения выключающий элемент x появляется на периоде работы исполнительного элемента у, что видно из циклограммы
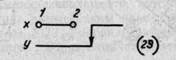
Очевидно, что здесь на периоде 1...2 необходимо введение элемента, который бы предотвращал выключение у. Таким элементом может быть контакт реле К. Тогда циклограмма будет
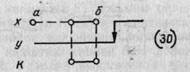
Напишем условие невыключения исполнительного элемента у на периоде работы а... б:

Таким образом, избыточность условия выключения также обеспечивается последовательно включенным в цепь управления размыкающего контакта К.
Введение только основных элементов xi; yi в условия включения f' или выключения f" иногда бывает недостаточным, так как может произойти ложное срабатывание. В этих случаях приходится вводить дополнительные промежуточные элементы yi которые предотвращают это ложное срабатывание. Для определения необходимости в этих промежуточных элементах проводят три проверки по циклограмме.
Первая проверка заключается в анализе достаточности условия включения f' в течение всего периода работы элемента системы у.
Вторая проверка заключается в анализе появления условия выключения f" в течение всего включающего периода.
Третья проверка заключается в анализе условия, чтобы после отключения элемента системы у не создавались вновь условия для его включения f' (ложное включение).
В качестве промежуточных элементов желательно использовать уже ранее введенные элементы системы или дополнительные промежуточные элементы yi.
В простых случаях составление математической модели управления можно производить по словесному описанию работы.
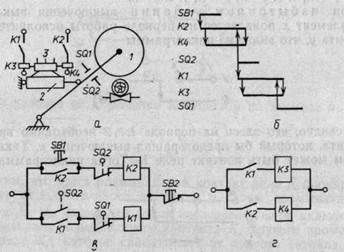
Рис. 10.10. Схема управления пилой
При этом определяются условия включения и выключения, очередность и продолжительность их действия. Затем по словесному описанию или циклограмме составляются логические управления математической модели объекта. Далее производится анализ полученных уравнений с точки зрения минимизации включающих и выключающих элементов и, наконец, составляется принципиальная схема управления технологическим объектом (схемная модель).
Проиллюстрируем эту очередность и условия составления математической модели примером.
Требуется автоматизировать рабочие операции опускания балансирной пилы и ее подъема в исходное положение (рис. 10.10, а).
Составляем словесное описание работы балансирной пилы (объекта). Нажатием кнопки «пуск» SB 1 рис. 10.10, б оператор
дает команду на опускание пилы 1 в крайнее положение, после чего пила должна вернуться в верхнее положение и остановиться, ожидая новой команды. В качестве исполнительного элемента привода балансира пилы использован гидроцилиндр 2, который управляется золотником 3, сам золотник управляется при помощи электромагнитов КЗ, К4. Эти технологические условия работы объекта можно выразить более формализованной логической фразой, а именно: «Пила вниз, затем вверх, стоп».
Определяем условия включения и выключения движения вниз и вверх.
Условие движения вниз определяется нажатием кнопки пуск SB 1 оператором. Очевидно, что условие выключения движения вниз должно наступить в момент, когда пила займет крайнее нижнее положение, следовательно, здесь необходима установка воспринимающего элемента, который бы фиксировал это нижнее положение пилы. Таким элементом может служить конечный выключатель SQ 2. Условие движения пилы вверх определяется включением SQ 2, а окончание этого движения SQ 1 «стоп».
Определяя продолжительность рабочих операций, видим, что действие кнопки «пуск» SB 1 и действие конечных выключателей кратковременно, поэтому заданное движение необходимо «запомнить». Для этого в качестве запоминающих элементов (промежуточные элементы F) возьмем реле К 1 и К 2, которые своими контактами K 1 и K2 будут имитировать эту память. Таким образом, условие включения движения пилы вниз будет SB 1 + K 2, т. е. к нажатию кнопки SB 1 добавляется (прибавляется) память К 2. Условие выключения движения вниз будет f"=SQ 2. Условие движения пилы вверх f' = SQ 2+ K 1, т. е. к SQ 2 (добавляется память K 1). Условие выключения (стоп) движения вверх f"=SQ 1.
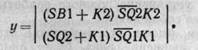
Составляем математическую модель автоматического управления балансирной пилы:

Как мы увидим в дальнейшем, эту математическую модель более удобно записывать в матричной форме*, т. е.
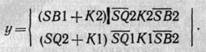
Очевидно, что для аварийной остановки объекта необходима кнопка общей остановки SB2.
* Матричная запись математической модели представляет собой таблицу, составленную из логических уравнений, где в строчках записываются их произведения, а в колонках их сумма. Матрицы очень удобны с точки зрения преобразования всей математической модели и ее обзорности.
Тогда математическая модель работы установки будет
Анализируя полученную математическую модель управления, видим, что его можно упростить, вынося за скобки общий
индекс SB 2:
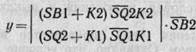
По полученной математической модели составляется принципиальная схема управления (схемная модель), которая показана на рис. 10.10, в.
Схему автоматического управления балансирной пилой можно составить и по циклограмме (см. рис. 10.10, б). Циклограмма является графической моделью автоматизированной системы. Она представляет собой совокупность горизонтальных отрезков, которые изображают продолжительность и очередность работы включающих, выключающих, промежуточных и исполнительных элементов. Каждому элементу соответствует своя горизонтальная строка. Воздействие элементов указывается стрелкой.
В нашем примере имеем следующие основные элементы: кнопку пуск SB 1, электромагниты К 3 и К 4 и конечные выключатели SQ 1 и SQ 2. Сама циклограмма строится на основе заданного условия работы, т. е. оператор нажимает кнопку SB 1 и пила должна начать движение вниз, затем вверх и остановиться. Анализируем циклограмму по трем условиям, а именно: достаточно ли условие включения; достаточно ли условие выключения; нет ли возможности ложных срабатываний при выключении элементов системы. Из циклограммы видно, что условия включения недостаточны у элементов К З и К 4, поэтому добавляются дополнительные элементы в виде реле K 1 и K 2, контакты которых К 1 и K 2 поддерживают включенными элементы К З и K 4 на всем периоде их работы. Условия выключения элементов и устранение ложного срабатывания по второй и третьей проверке соблюдаются.
Таким образом, имеем, что включение электромагнита K 4, обеспечивающего движение вниз, будет описываться следующим уравнением:

Аналогично для движения вверх

Заметим, что конечный выключатель SQ 2 является для реле K 2 выключающим элементом, а для реле K 1—включающим. Выключающим элементом для реле K 1 является, как это видно из циклограммы, конечный выключатель SQ 1.
Автоматическое управление электромагнитами K З и K 4 производится контактами реле K 1 и К2. Следовательно, логические уравнения для включения и выключения электромагнитов будут ук3=К1КЗ и yк4= K 2 K 4. Схема управления показана на рис. 10.10, г.
Схему управления балансирной пилой можно синтезировать
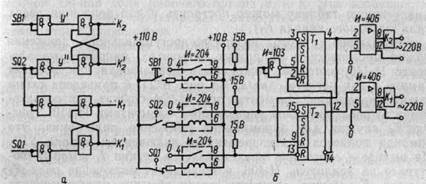
Рис. 10.11. Схемы управления пилой на логических элементах
и на базовых логических элементах И-103, используя для этого ранее полученную математическую модель и контактную схему управления (см. рис. 10.10, в).
Особенностью математической модели управления является наличие функции памяти, которая реализована на реле К 1 и К2. На бесконтактных логических элементах И-103 эта функция реализуется перекрестной связью двух таких элементов, (см. 10.9 ). Следует также отметить, что полученный таким образом триггер управляется подачей нулевого потенциала. Поэтому для записи и стирания сигнала управления от конечных выключателей SQ 1 и SQ 2 эти сигналы необходимо инвертировать. Такое инверсирование можно произвести дополнительными элементами И-103, на вход которых и поступают сигналы от кнопки SB 1 и выключателей SQ 1 и SQ 2. На рис. 10.11, α представлена такая схема управления на бесконтактных элементах, а функционирование сигналов управления показано только для первого триггера в табл. 10.2. Запись функции и ее стирание определяются состоянием реле K2· Из таблицы видно, что запись производится во второй фазе при срабатывании кнопки SB 1, а стирание при срабатывании выключателя SQ 2.
Таблица 10.2
| Фаза сигнала | SB 1 | SQ 2 | у' | К 2 | К' 2 | у" |
Аналогичную таблицу можно построить и для движения вверх (для выходного канала Κ 1 ).
Реализацию такого возвратно-поступательного движения можно произвести и на других элементах, например на элементе И-110, который может быть использован как элемент памяти и как регистр сдвига. На рис. 10.11, б приведена схема такого управления. Элементы типа И-204 служат для согласования входных сигналов управления с элементами И-110. Триггер Τ 1 служит для запоминания движения пилы вниз. Эта команда подается кратковременным включением кнопки SB 1. На выходе 4 этого триггера появляется сигнал 1, который поступает на усилитель И-406, и происходит включение реле K 2 (вместо K 2 можно включить сразу обмотку электромагнита К 4 ). Одновременно с этим сигнал с выхода 4 поступает на вход 9 триггера Т2 для переключения его в состояние 0 (взаимная блокировка триггеров). При достижении нижнего положения срабатывает конечный выключатель SQ 2 и триггер T 1 через элемент И-103 переключается в состояние 0 (память стерта) и реле K 2 обесточивается. В это же время происходит включение триггера T2 в состояние 1, с выхода 12 которого сигнал поступает на второй усилитель И-406. Включается второе реле Κ 1 (электромагнит Κ 1 ) и начинается движение пилы вверх. При переключении триггера Т2 в состояние 1 сигнал с его инверсионного выхода 14 поступает на вход 2 триггера T 1, таким образом производится взаимная блокировка, которая не позволяет триггеру Т 1 переключиться в состояние 1. При движении пилы вверх срабатывает выключатель SQ 1 и на вход 13 триггера Т2 поступает сигнал, переключающий его в состояние 0 (память стерта). Обесточивается и реле Κ 1 (электромагнит Κ 1 ). На схеме также показаны правила включения всех элементов и соответствующие напряжения питания и управления на соответствующих вводах.
Дата добавления: 2015-08-27; просмотров: 165 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| СИНТЕЗ МАТЕМАТИЧЕСКОЙ МОДЕЛИ УПРАВЛЕНИЯ ПО ТАБЛИЦЕ СОСТОЯНИЯ | | | ТИПОВЫЕ СХЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ |