Читайте также:
|
При инженерном синтезе АСР требуется обеспечить необходимую точность и приемлемый характер переходных процессов, т. е. минимизировать динамический заброс Δ у д, время t п переходного процесса и его колебательность, устранить установившуюся ошибку регулирования и определить полную схему системы. Обычно при этом решается задача определения требуемых величин параметров настроек регулятора и корректирующих средств, обеспечивающих высокое качество процесса регулирования.
При этом параметры объектов, измерительных, регулирующих органов АСР являются неизменными, а параметры настройки регуляторов меняются легко и просто.
Существует целый ряд методов инженерного синтеза АСР, которые дают хорошие результаты:
1. Синтез АСР по минимуму интегральной оценки, которая дает общую оценку быстроты затухания и величины отклонения x(t)=g(t) — y(t) регулируемого параметра в совокупности без определения того и другого в отдельности. Наиболее приемлемым является минимизация квадратичной оценки вида

(9.14)
x в этой формуле необходимо заменить соответствующим выражением из дифференциального уравнения АСР по ошибке, в котором переменными, например, для ПИД-регулятора являются рассмотренные выше параметры настройки: k р, k н, k пр. Величины этих параметров настройки регулятора, минимизирующие оценки I, определяются при решении понятной системы уравнений

(9.15)
Это наиболее универсальный метод определения параметров настройки регуляторов. Расчеты целесообразно проводить на ЭВМ.
2. Синтез АСРпри ее анализе на ЭВМ. Из рис. 9.6 нетрудно понять, что, изменяя величины сопротивлений R1, R2, тем самым изменяем коэффициент усиления регулятора kp' = R2/R1. При этом изменения настройки регулятора иллюстрируются характером и показателями качества процесса регулирования на экране осциллографа, т. е. методом проб и ошибок можно определить требуемые параметры настройки регулятора, обеспечивающие хорошее качество регулирования.
3. При синтезе АСР скорости вращения электродвигателей рабочих механизмов, а также других объектов используется
метод логарифмических амплитудных частотных характеристик (ЛАЧХ) системы в разомкнутом состоянии. Строится ЛАЧХ исходной системы. По заданному желаемому виду переходного процесса, обеспечивающему хорошее качество регулирования, строится желаемая ЛАЧХ. Вычитанием ЛАЧХ исходной системы из ЛАЧХ желаемой получается ЛАЧХ коррекции, по которой подбирается схема и параметры блока коррекции регулятора исходной АСР электропривода. Блоки коррекции обычно строятся на цепочках RC.
4. Экспериментальные методы на действующей АСР обес-
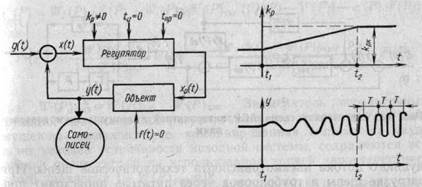
Рис. 9.7. Экспериментальное определение параметров настройки регулятора
печивают определение параметров настройки регулятора, которые дают достаточно хорошее качество регулирования данной АСР (рис. 9.7). Устраняются возмущающие воздействия, f(t)= 0, время изодрома (t и = 0), время предварения (t пр = 0) регулятора также ставятся на нуль. При пропорциональном регуляторе (k p ≠0) регулируется процесс с записью на самописце изменений регулируемого параметра y(t). В момент времени t1 начинается постепенное увеличение коэффициента усиления регулятора. При этом величина y(t) усиливает свои колебания и в момент времени t2 при коэффициенте усиления регулятора k рк в замкнутой АСР возникнут незатухающие постоянные колебания y(t) с периодом Т. При величине k p =k рк АСР находится на колебательной границе устойчивости. По величинам k рк и Τ при помощи эмпирических формул можно достаточно надежно определить параметры настройки регуляторов: 1) П-регулятор k p = k рк/2,2 2) ПИ-регулятор k p = k рк/2,2,tи
= 0,85 T; 3) ПИД-регулятор k p = k рк/1,7, tи = 0,5 Т, t пр = 0,12 Т.
Существуют также и другие экспериментальные методы определения настроек регулятора.
Дата добавления: 2015-08-27; просмотров: 117 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ОСНОВНЫЕ ПОКАЗАТЕЛИ КАЧЕСТВА АСР | | | КОМПЕНСАЦИЯ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ ПРИ СИНТЕЗЕ АСР |