Читайте также:
|
Нашей промышленностью выпускается большое количество аналоговых регуляторов непрерывного действия. По роду энергии для приведения в действие регуляторы бывают пневматические, гидравлические, электрические, электронные, электропневматические, электрогидравлические. По назначению различают регуляторы скорости, мощности, расхода, давления, температуры, размеров изделий и т. д.
В промышленных АСР в основном используется три типа регуляторов непрерывного действия:
1. Пропорциональные (статические) регуляторы или П-регу-ляторы. Это наиболее простые регулирующие устройства, у которых регулирующее воздействие хр пропорционально отклонению регулируемого параметра
x p= — kpx, (9.1)
где kp — коэффициент усиления регулятора. Передаточная функ-
ция регулятора W (Р) = xp(P)/x(P) = — kp. B П-регуляторах имеется
механизм настройки зоны регулирования σ (предела пропорциональности), σ=1/ k p.Чем больше зона регулирования, тем
меньше kр, меньше хр и тем больше статическая (установившаяся) ошибка регулирования Δ y ст (рис. 9.2) при одном и том же отклонении регулируемого параметра х. Знак минус в законе регулирования (хР = — kpx) указывает на то, что регулятор с объектом соединяется отрицательной обратной связью. П-ре-гуляторы применяются обычно в простых АСР параметров объектов с самовыравниванием.
2. Пропорционально-интегральные (изодромные) регуляторы или ПИ-регуляторы имеют закон регулирования

(9.2)
где t и — время изодрома, определяющее интенсивность введения интеграла в закон регулирования. Передаточная функция
W (Р) = — kp(1+(1/t и P))· Эта формула и структура регулятора рис. 9.2 показывают, что регулирующее воздействие хР склады-
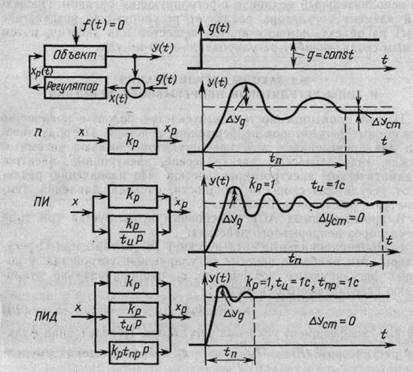
Рис. 9.2. Типы регуляторов непрерывного действия
фективны при быстроменяющихся нагрузках, при регулировании объектов как с самовыравниванием, так и без него, а также при наличии в объектах запаздывания.
3. Пропорционально-интегрально-дифференциальные регуляторы или ПИД-регуляторы характеризуются законом регулирования:

(9.33
где t прp — время предварения, характеризующее интенсивность введения производной в закон регулирования. Передаточная
функция ПИД-регулятора W (P) =—k p(1+(1/ t и P)+ t пр P)).
Введение производной dx/dt в закон регулирования дает возможность регулятору работать с предварением. Тогда, когда только намечается в АСР появление отклонения x (t)=g(t) — — y(t), но оно еще незначительно и составляющие регулирую-
щего воздействия kpx и

пренебрежительно малы, и
здесь значение dx/dt может быть большим и эта составляющая х Р будет сразу интенсивно воздействовать на объект с предварением, не давая отклонению х дальше расти. Эти регуляторы обладают высоким быстродействием, обеспечивают интенсивное затухание переходного процесса АСР и особенно эффективны для регулирования объектов, которые подвергаются частым и глубоким возмущающим воздействиям.
На рис. 9.2 показан пример динамики АСР одного и того же объекта регулирования с использованием П, ПИ, ПИД -регуля-торов с одинаковыми единичными настроечными параметрами k P = 1, t и = 1 с, tпр=1 с. Преимущества ПИ Д-регулятора по сравнению с П и ПИ-регулятором очевидны. Уместно отметить, что ПИ и ПИ Д-регуляторы при обработке скачкообразных управляющих воздействий g (t) полностью устраняют статическую (установившуюся) ошибку регулирования ( Δ у уст = 0). На рис. 9.2 наглядно представлена зависимость динамического заброса процесса Δ у дин и продолжительности переходного процесса t п от типа регулятора. Причем Δ у дин =x дин, Δ у уст = х уст.
Дата добавления: 2015-08-27; просмотров: 218 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ОСНОВНЫЕ ПОНЯТИЯ | | | АНАЛИЗ КАЧЕСТВА АСР |