|
Читайте также: |
Качество процесса регулирования определяется величинами динамического заброса выходного параметра и его колебательностью в переходном процессе, установившимися (статическими) ошибками регулирования, временем переходного процесса и устойчивостью АСР.
От качества АСР зависят качество выпускаемой продукции, расход сырья, энергии. Например, низкое качество АСР проваривания фанерных ванчесов ведет к повышенному браку строганого шпона, к перерасходу древесины, пара. Невысокое качество показателей следящей системы автоматической сортировки бревен вызывает разброс торцов лесоматериалов в лесо-накопителях, кострение сортиментов в пачках.
При низком качестве показателей АСР пневмотранспорта технологической щепы вследствие нестабильности скорости турбулентного пневмотранспортного потока и пульсаций давления
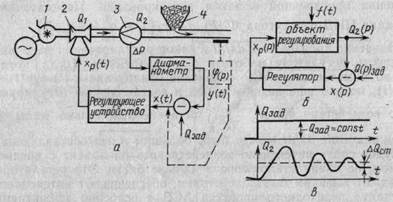
Рис. 9.3. АСР расхода воздуха пневмотранспорта технологической щепы
часть щепы от весьма большого числа интенсивных соударений недопустимо измельчается в труху и переходит в брак. Следовательно, даже наличие соответствующей АСР может не дать требуемых показателей качества технологического процесса переработки древесины.
Рассмотрим анализ и синтез АСР на примере системы стабилизации скорости аэродинамического потока при пневмотранспорте технологической щепы (рис. 9.3, а). Воздуходувка с электроприводом 1 нагнетает в трубопровод воздух, который проходит через регулирующий клапан 2, датчик расхода воздуха (диафрагму) 3. Через питатель 4 в трубопровод подается технологическая щепа. Вследствие нестабильности аэродинамических характеристик воздуходувки и других причин оптимальная пневмотранспортная скорость потока может быть создана автоматической стабилизацией расхода воздуха: Q 1 — расход воздуха через клапан, м3/с; Q2 — расход воздуха перед питателем, м3/с.
Передаточные функции отдельных звеньев АСР можно представить в виде следующих выражений.
1. Трубопровод между клапаном 2 и диафрагмой

где k 1 = 1, так как в установившемся режиме процесса Q 2 = Q 1, k — коэффициент усиления объекта. Постоянную времени T 1 определяют расчетом, исходя из заданной скорости воздуха и расстояния между клапанами 2 и диафрагмой 3.
2. Диафрагма — датчик расхода воздуха преобразует величину Q 2 в перепад давления АР. Это безынерционное усилительное звено
где k2 — коэффициент усиления, определяется по статической характеристике диафрагмы.
3. Дифференциальный манометр служит для преобразования величин перепада давления ΔΡ в пневматический или электрический сигнал у, подаваемый в блок сравнения регулирующего устройства. Применяются в основном безынерционные дифманометры с передаточной функцией W (Р)дфм = = Υ (Ρ)/ Δ Р (Ρ) =k3, k3 = const, определяется статической характеристикой дифманометра.
4. Передаточная функция регулирующего устройства зависит от типа выбранного регулятора. П-регулятор, W (Р)рег = k р,
ПИ-регулятор, W (Р)рег = kp (1+1/(t и P)), ПИД-регулятор
W (Р)рег = kp (1+1/(t и P) + t пр P). Здесь kp, t и, t пр — известные
нам величины принятых настроек регуляторов.
5. Клапан 2, изменяющий величину расхода воздуха Q1 представляется апериодическим звеном первого порядка
W (Р) кл =Q1(P)/X p (P)=k4/T2P+1. Коэффициент усиления k4, по-
стоянная времени мембраны клапана T2 определяются по паспортным данным этого исполнительного механизма.
Передаточная функция АСР в разомкнутом состоянии, как это было показано ранее, равна произведению передаточных функций отдельных звеньев, т. е.
для П-регулятора

(9.4)
для ПИ-регулятора

(9.5)
для ПИД-регулятора

(9.6)
где k c = k 1 k 2 k 3 k 4 k p — коэффициент усиления системы в разомкнутом состоянии.
Выделим отдельно регулятор, в состав которого войдет датчик расхода воздуха 3, дифманометр, регулирующее устройство и клапан 2. Тогда коэффициент усиления этого комплекса-регулятора K p / = k 2 k 3 k 4 k p. Соединим регулятор с объектом отрицательной обратной связью (рис. 9.3, б). Рассмотренным выше способом получим передаточные функции АСР в замкнутом состоянии каждого типа регулирующего устройства.

(9.7)

(9.8)

(9.9)
Заменой P = d/dt при нулевых начальных условиях получаем дифференциальные уравнения АСР расхода (скорости) воздуха в трубопроводе.
Определение точности АСР расхода воздуха в установившихся режимах.
В данном случае при скачкообразном изменении управляющего воздействия Q зад(t) (т. е. при скачкообразном изменении положения задатчика регулятора) при отсутствии возмущающих воздействий f (t)=0 в конце переходного процесса при t →∞ возможно появление установившейся (статической) ошибки регулирования (рис. 9.3, в) Δ Q ст.
В соответствии с формулой о конечном значении оригинала функции, но в представлении изображений Карсона-Хевисайда, определим статические ошибки АСР расхода воздуха с тремя типами регуляторов. Воспользуемся формулами (9.7), (9.8), (9.9). Δ Q ст = Q зад— Q 2, причем W(P) зам =--Q2(P)/Q (Р)зад. Пусть Q (Р)зад=1, то Δ Q ст=1—Q2 и W(P) зам = Q2(P)/1, следовательно,

(9.10)
Подставив в уравнение (9.10) выражение W зам (P) для каждого типа регулятора и учитывая Р = 0, получим значения статических ошибок регулирования. Для П-регулятора,Δ Q ст= 1/1+ k c; для ПИ-регулятора Δ Q ст = 0; для ПИД-регулятора Δ Q ст = 0. Следовательно, для уменьшения ошибки АСР с П-регулятором необходимо увеличивать k c, т. е. увеличивать коэффициент уси-
ления регулирующего устройства k p. Уместно отметить, что при изменении управляющего воздействия по закону Q зад = at, а = const, ACP с П-регулятором будет иметь Δ Q ст->°°; ACP с ПИ и ПИД-регуляторами Δ Q ст = a/k с, т. е. и здесь полезно увеличивать величину k p, однако чрезмерное увеличение k p ведет к большой колебательности переходного процесса. Следовательно, П-регулятор приемлем в данном случае для АСР стабилизации расхода воздуха и неприемлем для АСР программного и следящего типа, когда управляющее воздействие меняется по закону Q зад = at. В данном случае введение в АСР дополнительного интегратора для П-регулятора Δ Q ст сделает конечной величиной и для ПИ, ПИД-регулятора Δ Q ст = 0.
Дата добавления: 2015-08-27; просмотров: 238 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ЗАКОНЫ РЕГУЛИРОВАНИЯ И ТИПЫ РЕГУЛЯТОРОВ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | | | УСТОЙЧИВОСТЬ АСР |