Читайте также:
|
Моделирование переходных процессов будем проводить с помощью пакета MatLab, используя реальные элементы из библиотеки математического пакета.
Схема модели представлена на рис.3.5.
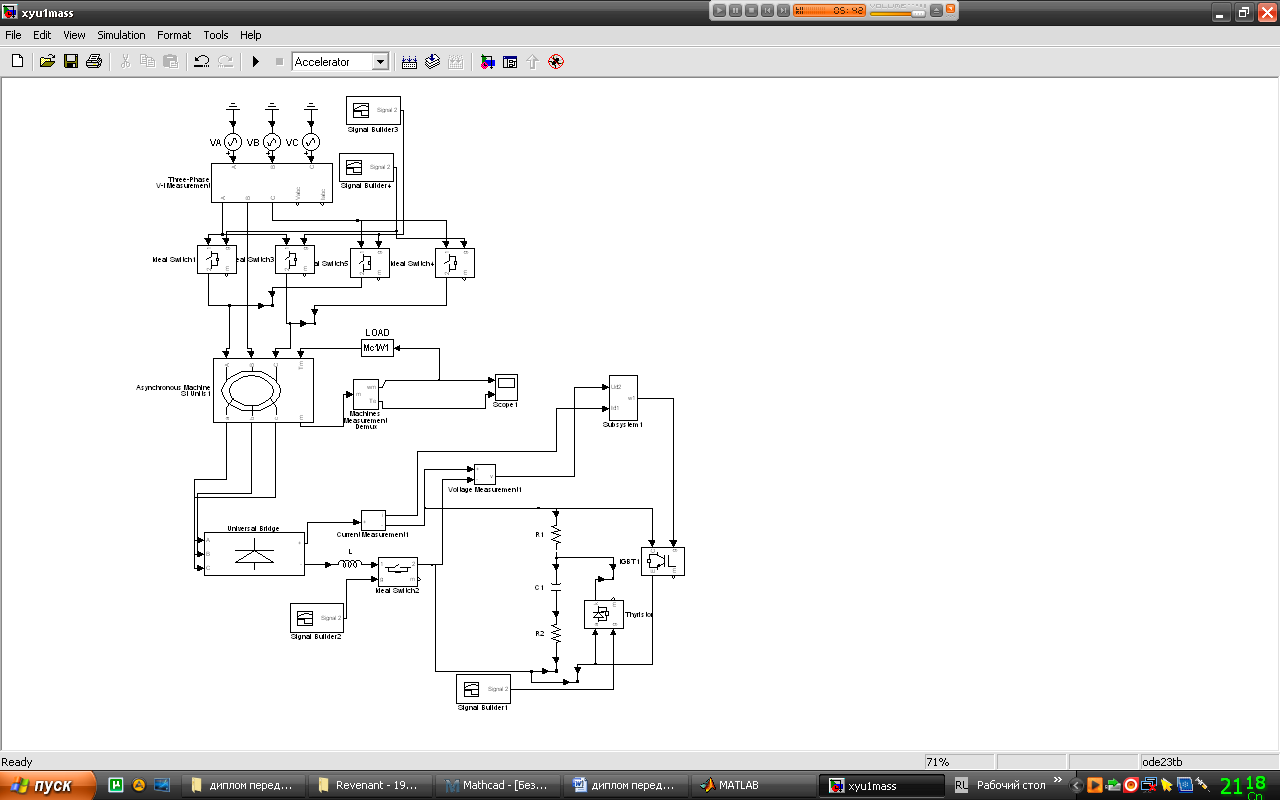
Рис3.5. Модель одномассовой системы ЭП.
На рис 3.6. Subsystem1 это блок, предназначенный для управления IGBT ключём.
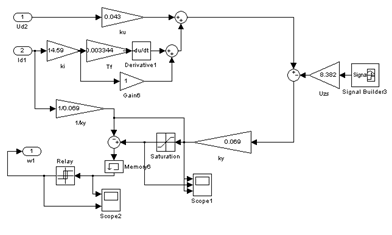
Рис.3.6. Блок управления.
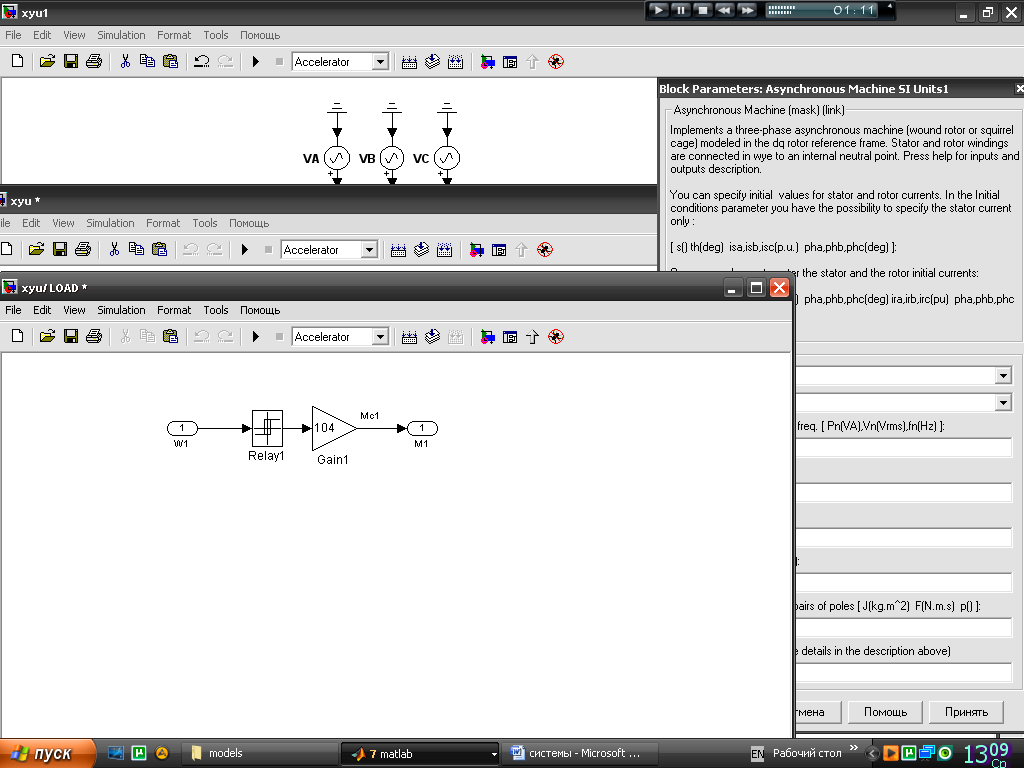
Рис. 3.7 Блок нагрузки
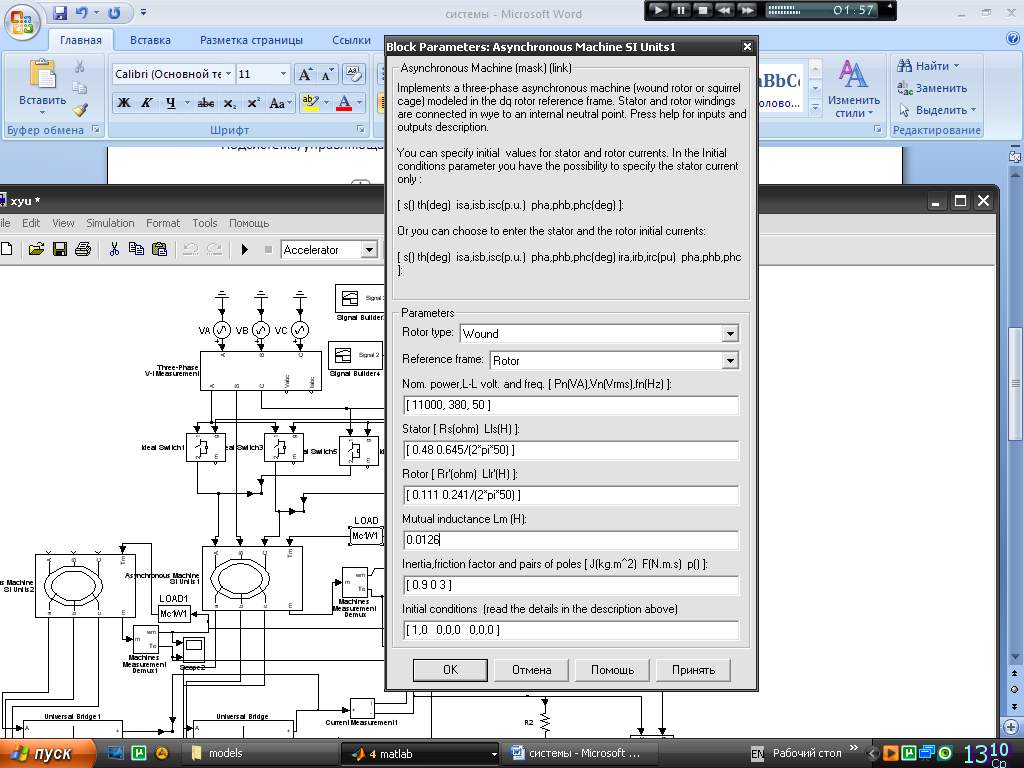
Рис. 3.8 Параметры двигателя
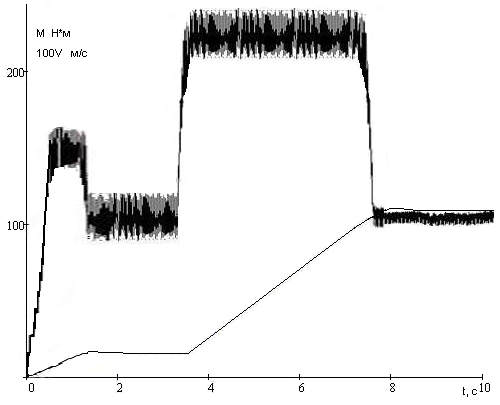
Рис.3.9 Переходные процессы в одномассовой системе
Модель двухмассовой системы представлена на рис. 3.10.
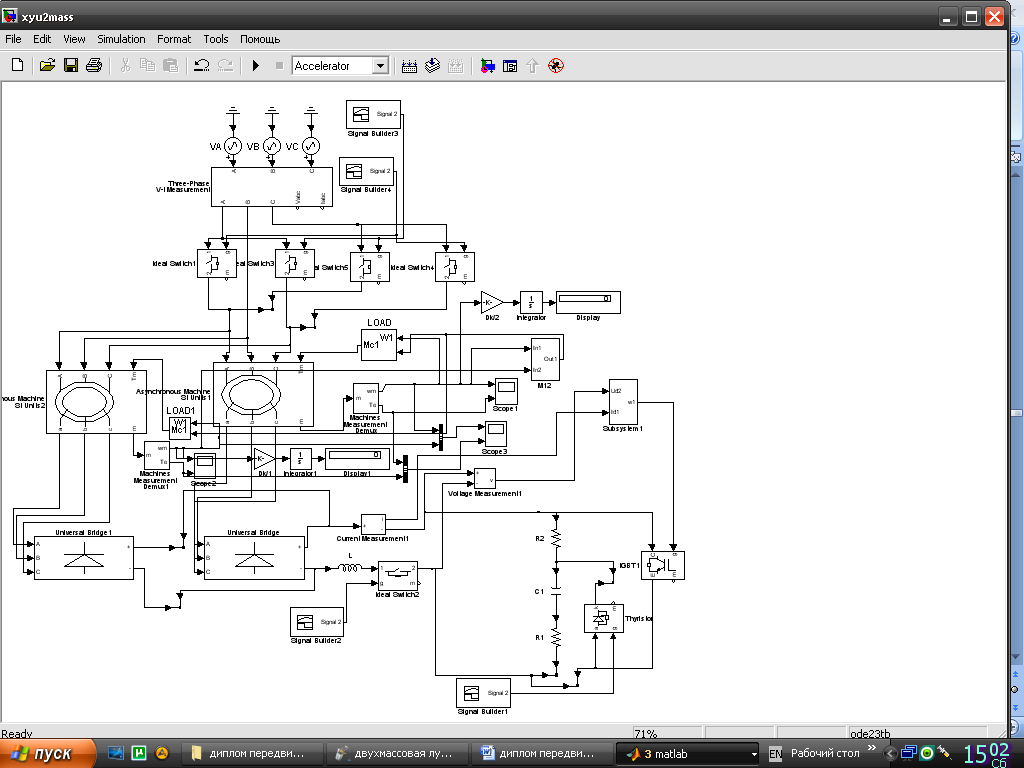
Рис. 3.10 Модель двухмассовой системы ЭП.
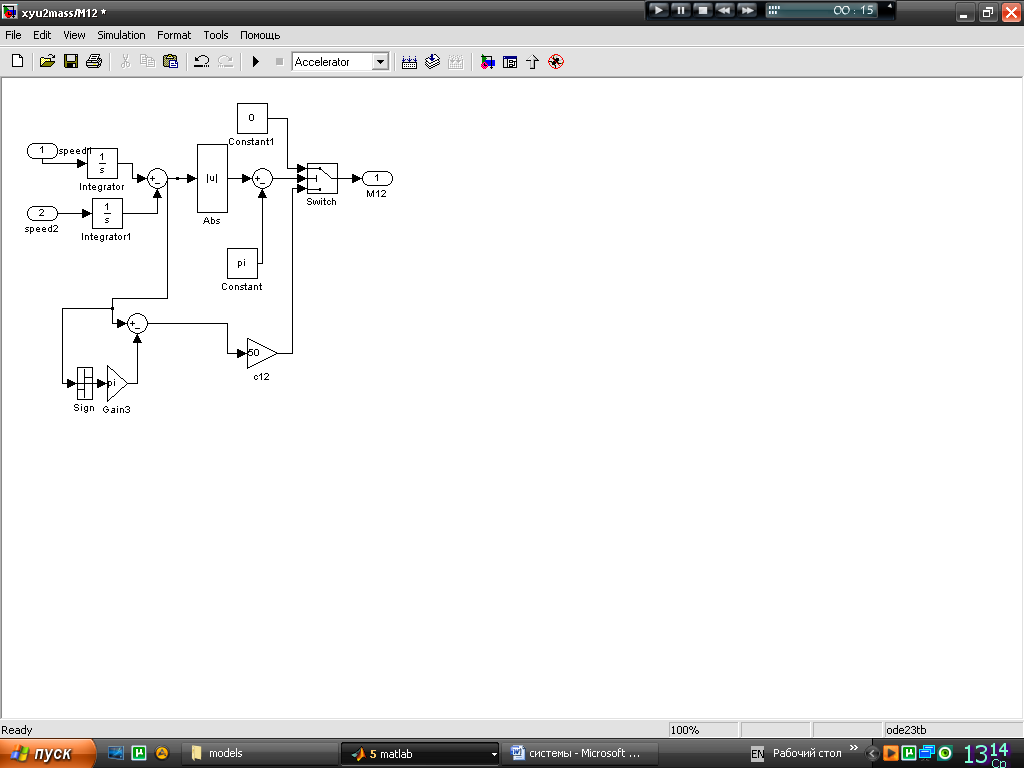
Рис. 3.11 Подсистема взаимодействия двигателей (момент М12)
На рис. 3.12 представлены переходные процессы в двухмассовой системе при Мс1=0.6Мн, Jдв2=0.7 кгм2, Мс2=1.5Мн, Jдв2=1.8 кгм2, с12=50 Нм/рад, Δφз=2π.
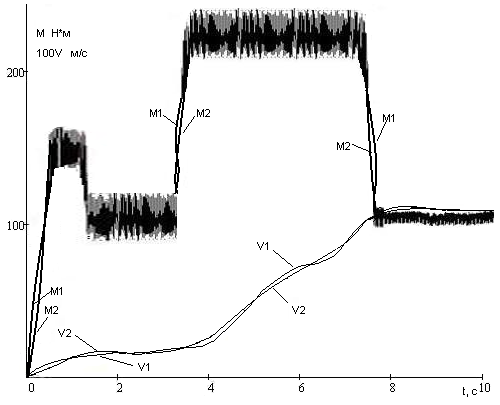
Рис.3.12 Переходные процессы в двухмассовой системе
На рис. 3.13 представлены переходные процессы в двухмассовой системе при Мс1=0.2Мн, Jдв2=0.9 кгм2, Мс2=Мн, Jдв2=1.4 кгм2, с12=50 Нм/рад, Δφз=2π.
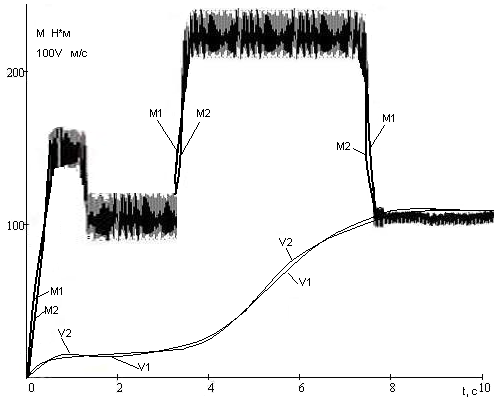
Рис.3.13 Переходные процессы в двухмассовой системе
Выводы: В данной главе проведен анализ динамических свойств электропривода: из которого видно, что система ведет себя устойчиво. Смоделированы переходные процессы пуска на пониженную и основную скорость. Получено, что система с достаточной точностью отрабатывает сигнал задания, момент ограничивается на требуемом уровне и обеспечивается регулирование скорости системы заданном диапазоне. Моделирование показало проходимые стойками крана пути: для одной стойки 5.405 м, для другой 5.431 м.
Дата добавления: 2015-08-18; просмотров: 96 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Анализ динамических свойств системы частотным методом | | | Разработка схемы управления и описание ее работы |