Читайте также:
|
Принципиальная электрическая схема двухдвигательного электропривода перемещения козлового крана с импульсным регулятором в роторной цепи, построенной на основе силового транзистора представлена на рис. 4.1.

Рис. 4.1. Принципиальная электрическая схема
Силовая часть схемы подключается через автоматический выключатель QF1 с помощью контактов линейного контактора KM1, выполняющего функцию нулевой защиты. К выходу автоматического выключателя QF1 подключается также блок питания платы управления электроприводом.
Электромагнитный тормоз YB получает питание от QF1 через контакты контакторов KM1 и KMT.
Статоры асинхронных двигателей подключается через полупроводниковый реверсор, построенный на симисторах VS1-VS4, шунтированных конденсаторно-резистивными защитными цепями R4C1-R10C8, ограничивающими скорость нарастания напряжения на симисторах. Для защиты реверсора от токов короткого замыкания служат быстродействующие плавкие предохранители FU1 и FU2. Реверсор предназначен для бесконтактной коммутации статорной цепи в двигательном режиме и в режиме торможения.
В роторную цепь включен неуправляемый выпрямитель UZ замкнутый на активно-емкостную цепь из элементов C1, R1, R2, шунтированную силовым биполярным транзистором с изолированным затвором (IGBT).
Для выделения сигнала обратных связей по выпрямленному напряжению и току ротора, необходимых для формирования схемой платы управления заданных механических характеристик используются датчики LV25 и LA55 соответственно.
Тиристор КМУ предназначен для шунтирования цепи С1-R2 c целью расширения области регулирования в зону больших значений моментов и токов.
Релейно-контакторная схема.
Релейно-контакторная схема двухдвигательного ЭП передвижения козлового крана представлена на рис. 4.2. В нее входят:
- командоконтроллер SM1-SM9;
- трехполюсный контактор KM1;
- трехполюсный контактор электромагнитного тормоза KMT;
- конечные выключатели SQВ и SQН;
- реле контроля платы управления KV1.

Рис. 4.2. Релейно-контакторная схема
Контакты командконтроллера SM1-SM5 используется для коммутации цепей управления. Для надёжной коммутации контактов SM1-SM5 необходим ток 100 мА. Для этого подключаются балластные сопротивления Rб=24/0.1=240 Ом. Реле KV1 служит для отключения электропривода по цепи управления в случае ошибок в системе управления. Реле KV2 служит для отключения электропривода при отсутствии на плате управления напряжения +/-15 В.
Для обеспечения гальванической развязки платы управления от командоконтроллера и согласования уровней напряжения цепи командоконтроллера и платы управления связаны между собой через оптические пары U1-U5.
Схема платы управления.
Принципиальная схема платы управления представлена на рис. 4.3.
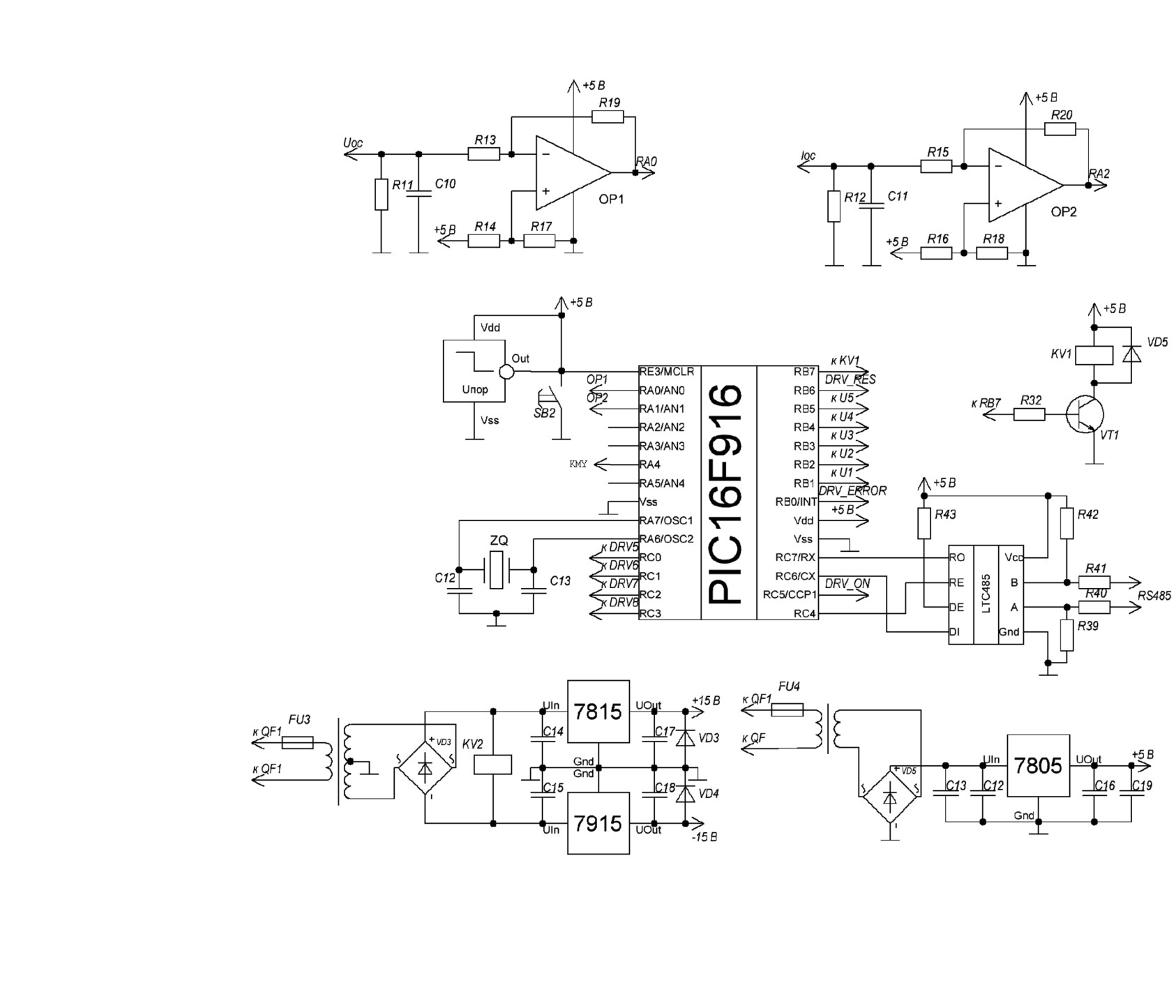
Рис. 4.3. Принципиальная схема платы управления
Ядром схемы управления является микропроцессор PIC16F916 фирмы Microchip. Данный микропроцессор обладает рядом встроенных периферийных модулей позволяющих использовать его в электроприводах: многоканальный 10-разрядный АЦП, внешний источник прерывания, встроенный модуль ШИМ, встроенная EEPROM-память, аппаратный модуль USART. Благодаря высокой частоте тактирования (до 20 МГц) математические операции можно реализовать программно.
Микроконтроллер в соответствии с выбранной оператором на командконтроллере механической характеристикой, в зависимости от заданного направления вращения, осуществляет коммутацию симисторов VS1-VS4 реверсора и IGBT в цепи выпрямленного ток ротора. Для согласования выходных логических уровней микропроцессора с управляющими уровнями силовых полупроводниковых ключей применены специальные устройства – драйверы. Для симисторов это MOC3081, для транзистора – отечественный модуль ДЖИЦ.687252.054, для тиристора – модуль ДЖИЦ.687253.435. Помимо согласования уровней драйверы обеспечивают также оптическую развязку цепей управления от силовой цепи. Драйвер IGBT также выполняет защитную функцию, отключая транзистор при аварийном превышении и посылая сигнал ошибки микроконтроллеру.Для аварийной остановки ЭП в цепи управления предусмотрено реле KV1, контакты которого входят в цепь питания контактора KM1. При отключении KV1 теряет питание KM1 и, как следствие, вся силовая часть схемы. Повторное включение электропривода возможно, при отсутствии ошибок в работе, лишь после возврата командоконтроллера в нейтральное положение.
Для получения информации о выпрямленном токе ротора в роторной цепи установлен компенсационный датчик тока на эффекте Холла фирмы LEM LA55-P. Выход датчика нагружается на резистор R12. Для согласования напряжения на выходе датчика со входным диапазоном напряжений АЦП микроконтроллера служит операционный усилитель OP1 (rail-to-rail типа) с обвязкой из резисторов R15, R16, R18, R20. Конденсатор C11 отфильтровывает высокочастотные помехи. Цепь ОС по напряжению состоит из элементов LV25-P/SP5, R11, C10, OP2, R13, R14, R17, R19.
Блок питания платы состоит из трансформатора выпрямителей и интегральных стабилизаторов напряжения. Пара стабилизаторов 7815 и 7915 обеспечивает двухполярное стабилизированное напряжение +/-15 В для датчиков в цепи ротора, стабилизатор 7805 обеспечивает питание остальной части платы управления. Микросхемы имеют встроенную защиту от перегрузки. Для защиты от токов короткого замыкания в блоке питания установлены предохранители FU3 и FU4. Драйвер IGBT питается от собственного комплектного блока питания. В цепь сброса микроконтроллера включена микросхема – супервизор питания, перезагружающая процессор при провале напряжения питания.
Для обеспечения сопряжения с ПК или другими цифровыми устройствами по последовательному интерфейсу на плате управления установлен драйвер промышленной шины ModBUS(RS485) микросхема LTC485, подключенная к линиям USART – микроконтроллера линия RC4 определяет направление передачи информации.
Процесс запуска электропривода.
В 0-ом положение командоконтроллера при включенных автоматах QF1 и QF2, и включенном реле KV1 на плате управления питание получает контактор KM1, подготавливающий схему к запуску. Микроконтроллер циклически опрашивает состояние линий SM1-SM5 командоконтроллера.
После установки командоконтроллера в 1-ое положение “Вперед”(“Назад”) получает питание контактор KMT, электромагнитный тормоз снимается. Микроконтроллер настраивается на выполнение подпрограммы стабилизации скорости электропривода. В соответствии с заданным направлением вращения, микроконтроллер, включает ту или иную группу симисторов реверсора. Производится настройка на выполнение программы стабилизации частоты вращения двигателя. Для этого последовательно измеряются напряжение на выходе выпрямителя в роторной цепи и ток ротора.
Затем по измеренным величинам с помощью известной формулы вычисляется текущее скольжение двигателя и сравнивается с заданным значением, хранимым в памяти микроконтроллера. Величина задания тока ротор пропорциональна разности текущего скольжения двигателя и заданного. Задание тока ограничено сверху максимально допустимым значением тока ротора. Заданное значение тока сравнивается с реально протекающим током ротора и, если заданное значение превышает, то подается сигнал на открытие IGBT, открывшись транзистор шунтирует RC-цепочку, закорачивая ротор двигателя, ток возрастает. Если ток ротора превосходит заданное значение транзистор закрывается роторный выпрямитель оказывается замкнут на RC-цепочку, ток ротора спадает. Так происходит стабилизация тока ротора.
После достижения двигателем в процессе пуска заданной величины скольжения дальнейший разгон прекращается и двигатель выходит на жесткую механическую характеристику 1В(1Н)(см. рис. 24), формируемую под воздействием сигналов Ui и Uu.
При снижении нагрузки на валу двигателя выпрямленный ток ротора уменьшается. Если ток ротора снизиться менее определенной заданной величины электропривод перейдет в состояние поиска режима работы. В этом режиме микроконтроллер, сделает паузу 0,3-0,4 секунды, после чего будет вызвана программа реверса. Подпрограмма реверса осуществляет отключение рабочей группы симисторов реверсора и спустя 20 мс (время необходимое для надежного запирания симисторов) подается сигнал на отпирание другой группы симисторов. После осуществления реверса изменяется программная уставка токоограничения и задания скольжения двигателя.
В результате двигатель оказывается работающим в режиме противовключения, электроприводом формируется продолжение жесткой характеристики 1В(1Н) во II(IV) квадрантах. Если в этом квадранте появляется нагрузка двигатель остается работать на этом участке характеристики. При отсутствии нагрузки ток ротора снова уменьшится и произойдет обратный переход в I(II) квадрант.
При переводе ручки командоконтроллера во второе и последующие положения микроконтроллер переходит от программы стабилизации частоты вращения к подпрограмме ограничения момента на валу двигателя. Также при переводе ручки командоконтроллера в третье положение открывается тиристор КМУ. Сигнал ОС по напряжению не используется при формировании характеристик. Ток ротора ограничивается заданным значением уставки для выбранной характеристики. Частота вращения ограничивается основной характеристикой двигателя.
Переход с характеристики с большей величиной токоограничения на характеристику с меньшей величиной осуществляется изменением уставки. При переходе с характристик 2-5 на жесткую характеристику 1 производится торможение двигателя в режиме противовключения. Для этого рабочая группа симисторов реверсора запирается и, спустя паузу, включается другая группа. Запускается программа формирования жесткой механической характеристики 1В(1Н) с настройками для II(IV) квадранта. Если момент на валу двигателя отрицательный то дальнейшая работа привода продолжается во II(IV) квадранте. При положительном моменте ток ротора спадает и при уменьшении ниже заданного порога выполняется программа поиска режима работы и привод переходит в I(III) квадрант.
Система управления обеспечивает реверсирование электропривода при быстром переводе рукоятки командоконтроллера через нулевое положение. В этом случае выполняется подпрограмма реверса, по окончанию которой двигатель оказывается работающим сначала в режиме торможния противовключением, а затем в двигательном режиме соответствующем установленному положению командоконтроллера. В первой позиции двигатель выходит на жесткую характеристику с пониженной скоростью, во 2-5 по характристике токоограничения на основную характеристику.
На плате управления предусмотрена защита силового транзистора от повреждения чрезмерно большим током. При возникновении такого аварийного режима драйвер отключает транзистор и подает запрос на прерывание микроконтроллеру. Повторное включение транзистора возможно лишь после перезагрузки драйвера. При повторении ошибки микроконтроллер останавливает электропривод путем отключения реле KV1, тем самым обесточивая KM1(двигатель отключается от сети и накладывается электромагнитный тормоз) и KMT. Повторный пуск привода, при отсутствии сбоев в работе, будет возможен лишь при возврате ручки командоконтроллера в нулевое положение.
Описание программного обеспечения.
При работе электропривода микропроцессор периодически опрашивает текущее состояние командоконтроллера, линии SM1–SM5 которого подключены соответственно к линиям RB1-RB5 микроконтроллера, в таблице 1 приведено состояние на входе ПОРТа B в зависимости от положения командоконтроллера.
Таблица4.1
| ПОРТ B | Выбранная на командоконтроллере характеристика | ||||||||||
| 5Н | 4Н | 3Н | 2Н | 1Н | Стоп | 1В | 2В | 3В | 4В | 5В | |
| RB1 | |||||||||||
| RB2 | |||||||||||
| RB3 | |||||||||||
| RB4 | |||||||||||
| RB5 |
При изменении положения относительно предыдущего сканирования вызывается подпрограмма определения положения командоконтроллера. Для исключения ошибок в работе подпрограммы, возможных при перемещении ручки командоконтроллера во время определения ее текущего положения, сохраняет состояние ПОРТа B в переменную PKK и дальнейшая работа производится с этой переменной. В ходе выполнения подпрограммы первоначально производится проверку на установку командоконтроллера в 0ое положение. Признаком этого служит состояния RB1: если RB1=0, то командоконтроллер установлен в позицию “Стоп”, подпрограмма сбрасывает уставки тока и скольжения. В случае не 0го положения командоконтроллера программой проверяется бит RB2 определяющий заданное направление вращения электродвигателя: RB2=0 вращение вперед, иначе – назад. В соответствии с заданным направлением вращения корректируется флаг NV, повторяющий состояние RB2.
Далее подпрограмма, по состоянию битов RB3-RB5 определяет заданную оператором характеристику работы для электропривода. Если только RB3 равен 0, то задана характеристика стабилизации частоты вращения. Производится загрузка уставки по току и скольжению ротора. Также устанавливается флаг RS указывающий остальным подпрограмма, на работу электропривода на пониженной скорости. Если выбрана характеристика ограничения момента двигателя, то флаг RS сбрасывается и производится загрузка только уставки по току ротора.
После определения нового задания для электропривода производится проверка на переход с характеристик ограничения момента на характеристику пониженной скорости. Если такой переход был то необходимо провести торможение противовключением, для этого производится замена уставок по току и скольжению на величины соответствующие работе электропривода во II(IV) квадрантах. Далее проверяется изменение задания направления вращения, если оно не изменялось, то для реализации торможения противовключением необходимо дополнительно провести реверсирование напряжений статора. Также реверсирование производится и при переходе по характеристикам ограничения момента при изменении заданного направления вращения.
Реверсирование производится следующим образом. Первоначально отключается транзистор в роторной цепи. После чего статор двигателя отключается от сети, это производится запиранием симисторов реверсора. Драйвера симисторов VS1-VS3 подключены соответственно к линиям RC0-RC3 микроконтроллера, для отключения симистора необходимо вывести логический “ноль” на соответствующую линию ПОРТа C. Драйвер тиристора КМУ подключен к линии RA4 микроконтроллера, для включения КМУ необходимо подать логический «ноль» на RA4. После снятия управляющих сигналов с симисторов для их надежного запирания выжидается пауза в 20 мс. Индикатором текущего направления вращения двигателя служит флаг NVt. Во время выполнения подпрограммы реверсирования производится его инвертирование. Новое направление вращение электропривода определяется группой симисторов реверсора включаемых после паузы, если флаг NVt=0, то подается сигнал на включение симисторов VS2 и VS4, иначе включаются VS1 и VS3.
Если рукоятка командоконтроллера не изменила своего относительно предыдущего опроса положения и текущее положение не нулевое, то в соответствии с состояние бита RS вызывается подпрограмма или стабилизации частоты вращения или подпрограмма ограничения момента двигателя.
Программа стабилизации частоты вращения при своем запуске производит проверку тока ротора на уменьшение ниже определенного минимального значения. Если ток превышает минимальную уставку электропривод работает в режиме стабилизации частоты вращения, при падение тока ротора ниже этой величины электропривод переходит в режим поиска. В режиме стабилизации частоты вращения по оцифрованным значениям текущего тока ротора ADCI и напряжения на выходе роторного выпрямителя ADCU рассчитывается значение скольжения St, с которым работает двигатель в данный момент. Из расчетного значения скольжения вычитается заданное Sz, полученная ошибка регулирования dS=St-Sz умножается на коэффициент K для получения задании тока ротора Iz. Величина заданного тока ограничивается сверху максимально допустимым значением для текущего квадранта. Вычисленное задание тока ротора сравнивается с протекающим в действительности током ротора, если фактический ток ротора, превышает заданное значение, IGBT запирается, иначе – открывается.
Если электропривод работает в режиме поиска, то производится реверсирование напряжения статора. Уставки скольжения и тока ротора изменяются на значения соответствующие новому рабочему квадранту: если биты NV и NVt имеют одинаковое значение, то работа будет производиться в I(III) квадрантах, если NV≠NVt, то работа в II(IV) квадранте.
В режиме ограничения момента двигателя текущее значение тока ротора It сравнивается с заданным Iz, если фактический ток ротора, превышает заданное значение, IGBT запирается, иначе – открывается. Таким образом формируется жесткий участок характеристики. Значение частоты не регулируется и ограниченно сверху естественной характеристикой двигателя.
При возникновении аварийных режимов работы ключа IGBT на микроконтроллер поступает запрос внешнего прерывания формируемый драйвером ключа. По этому запросу запускается подпрограмма блокировки электропривода. Снимается питание с реле KV1 путем записи обнуления значения линии RB7, что приводит к отключению двигателя от силовых цепей и наложению тормоза YB. Снимается сигнал включения IGBT. На драйвер подается сигнал перезагрузки. Повторный пуск электропривода возможен лишь после установки командоконтроллера в 0ое положение и перезагрузки микроконтроллера кнопкой SB1.
При каждом новом запуске электропривода микроконтроллер не замыкает реле KV1 до тех пор, пока не будет произведена первоначальная настройка платы управления: загрузка уставок из EEPROM в ОЗУ, конфигурирование портов и встроенных периферийных устройств, анализ исправности платы управления и ключа IGBT.
Опрос датчика тока и, если необходимо, датчика напряжения производится микроконтроллером перед каждым запуском программы анализирующей изменение положения командоконтроллера.
Программа работы микроконтроллера представлена в виде блок-схемы в приложении 5.
Дата добавления: 2015-08-18; просмотров: 487 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Расчет и построение переходных процессов | | | Составление спецификации на основное электрооборудование |