|
Читайте также: |
Перед тем как мы приступим к конструированию робота, посмотрим на готового робота, изображенного на рис. 11.5, и проанализируем, как робот осуществляет передвижение. Треножная походка, которая использована в данной конструкции, является не единственно возможной.

Рис. 11.5. Шестиногий ходок готов к прогулке
В передней части робота закреплены два сервомотора. Каждый из сервомоторов управляет движением передней и задней ног с соответствующей стороны робота. Передняя нога прикреплена непосредственно к ротору сервомотора и способна качаться вперед и назад. Задняя нога соединена с передней при помощи тяги. Тяга позволяет задней ноге повторять движения передней ноги вперед-назад. Две центральные ноги управляются третьим сервомотором. Этот сервомотор поворачивает центральные ноги вдоль продольной оси на угол от 20° до 30° по часовой стрелке и против часовой стрелки, что наклоняет робот вправо или влево.
Используя информацию о механизме привода ног, мы сейчас посмотрим, как наш робот будет передвигаться. Посмотрим на рис. 11.6. Мы начнем с положения покоя. Каждый кружок отмечает положение ноги. Как и в предыдущем случае, темные кружки показывают положение опорных ног. Обратите внимание, что в положении покоя средние ноги не являются опорными. Эти ноги на 3 мм короче передних и задних ног.
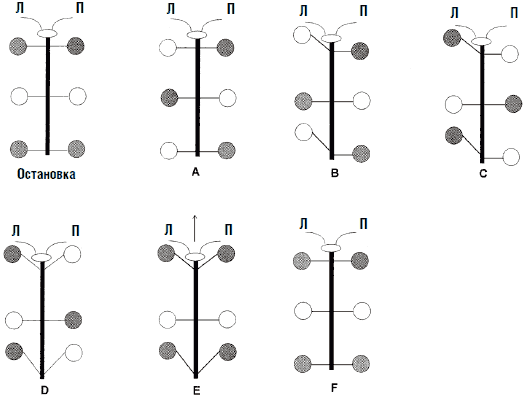
Рис. 11.6. Фазы движения шестинога
В позиции А центральные ноги поворачиваются по часовой стрелке на угол примерно 20° от центрального положения. Это приводит к наклону робота вправо. В данной позиции вес робота удерживается правой передней и задней ногами и левой центральной ногой. Это стандартная позиция «треножника», которая была описана выше. Поскольку левая передняя и левая задняя нога оказываются «в воздухе», то их можно передвинуть вперед, как показано на рис 11.6, позиция В.
В позиции С центральные ноги поворачиваются против часовой стрелки на угол примерно 20° от центральной позиции. Это приводит к наклону робота влево. В данной позиции вес робота распределяется между левой передней и задней ногами и правой средней ногой. Теперь правая передняя и задняя ноги не несут нагрузки и могут быть передвинуты вперед, как это показано на поз. D рис. 11.6.
В позиции Е центральные ноги возвращаются в среднее положение. В такой позиции робот «стоит» прямо и опирается только на передние и задние ноги. В позиции F передние и задние ноги одновременно перемещаются назад, а робот соответственно – вперед. Далее цикл движения повторяется.
Это был первый способ хождения, который я попробовал воспроизвести, и эта система работает. Вы можете разработать, совершенствовать и конструировать другие модели способов хождения, с которыми можно проводить эксперименты. Я оставлю вам разработку способов хождения назад (реверсирование) и поворотов направо и налево. Я буду продолжать совершенствовать этого робота, добавляя датчики наличия стен и препятствий, а также способов перемещения назад и поворотов.
Дата добавления: 2015-08-17; просмотров: 55 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Имитация жизни | | | Конструкция робота |