Читайте также:
|
За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование обеспечит точность положения отверстий под крепления сервомоторов. Четыре отверстия диаметром 4,3 мм расположены немного позади средней линии и предназначены для крепления центрального сервомотора. Эти четыре отверстия смещены к правому краю. Это необходимо сделать для того, чтобы фланец центрального сервомотора находился точно по центру «тела». Два задних отверстия предназначены для подвижного крепления задних ног.

Рис. 11.7. Основание «тела»
Для разметки центров отверстий под сверление необходимо использовать кернер. В противном случае при сверлении отверстий сверло может «увести». Если у вас нет кернера, вы можете использовать в качестве неплохой замены острый гвоздь.
Ноги робота изготовлены из алюминиевой полосы шириной 12 мм и толщиной 3 мм (см. рис. 11.8). В передних ногах просверливается по четыре отверстия. В задних ногах сверлятся два отверстия: одно для подвижного крепления, а другое – для крепления тяги. Обратите внимание, что задние ноги на 6 мм короче передних. Это объясняется тем, что необходимо учитывать высоту фланца сервомотора, к которому крепятся передние ноги, над общим уровнем пластины. Укорочение задних ног выравнивает положение платформы.

Рис. 11.8. Конструкция передних и задних ног
После сверления необходимых отверстий необходимо согнуть алюминиевую полосу по нужной форме. Зажмите полосу в тиски со стороны высверленных отверстий на расстоянии 70 мм. Нажмите на пластину и согните ее под углом 90°. Лучше всего нажимать на пластину непосредственно около губок тисков. При этом пластина согнется под углом 90° без риска выгибания самой «нижней» части ноги.
Центральные ноги выполнены из одного куска алюминия (см. рис. 11.9). При креплении к роботу центральные ноги оказываются на 3 мм короче передних и задних ног. Таким образом, в среднем положении они не касаются земли. Эти ноги предназначены для наклона робота вправо и влево. При вращении центрального сервомотора ноги наклоняют робота на угол примерно ±20°.
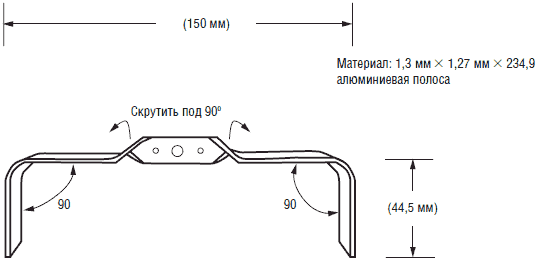
Рис. 11.9. Средние ноги
При изготовлении центральных ног в алюминиевой полосе размером 3х12х235 мм сверлятся сперва три центральных отверстия под фланец сервомотора. Затем алюминиевая полоса крепится в тиски, причем губки тисков по верхнему краю должны фиксировать полосу на расстоянии 20 мм от центра полосы. Зажмите полосу с помощью плоскогубцев на расстоянии примерно 12 мм от верхнего края тисков. Сохраняя зажим плоскогубцев, аккуратно скрутите алюминиевую полосу на угол 90°. Производите операцию достаточно медленно, иначе можно легко сломать пластину. Аналогично скрутите пластину с другой стороны.
После того как скручивание на 90° произведено, дополнительно согните пластину в двух местах на 90°, как мы это делали для передних и задних ног.
Дата добавления: 2015-08-17; просмотров: 96 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Работа устройства | | | Конструкция тяги |