Читайте также:
|
Скорость является важнейшим показателем дорожного движения. Управляя автомобилем, водитель обычно выбирает режим движения исходя из двух критериев:
минимальной затраты времени и максимальной безопасности движения. Эти критерии противоречивы и превышение допустимого предела скорости является одной из наиболее распространенных причин ДТП. Тяжесть их последствий и возможность предотвращения также непосредственно связаны со скоростью транспортного средства.
Рассмотрим, каким образом, выбирая соответствующую скорость автомобиля, можно предотвратить наезд на пешехода.
Для упрощения расчетов поперечными размерами пешехода можно пренебречь и изображать его в виде, "точки. Автомобиль изобразим прямоугольником, размеры которого равны габаритным длине и ширине. Считаем, что автомобиль и пешеход движутся прямолинейно и их траектории пересекаются под прямым углом. Скорость пешехода считаем постоянной, а безопасным интервалом пренебрегаем. Дорожную ситуацию, в которой возможен контакт (наезд, столкновение) транспортного средства с препятствием (движущимся или неподвижным), способный вызвать вредные последствия, называют опасной дорожкой обстановкой.
Безопасной назовем такую скорость автомобиля, следуя с которой водитель в момент возникновения опасной дорожной обстановки имеет техническую возможность тем или иным способом предотвратить наезд. При прямолинейном движении водитель может обеспечить безопасность одним из следующих способов:
остановить автомобиль до линии следования пешехода;
пересечь линию следования пешехода, проехав перед ним раньше, чем он достигнет полосы движения автомобиля;
пропустить пешехода перед автомобилем. При этом пешеход переходит полосу движения автомобиля раньше, чем тот достигнет линии следования пешехода.
Примем, что опасная дорожная обстановка возникает в момент пересечения пешеходом некоторой линии — границы опасной зоны (например, границы проезжей части).
Расстояние между пешеходом и автомобилем (измеренное по направлению движения последнего) в момент возникновения опасной обстановки обычно называют удалением (или удаленностью) автомобиля и обозначают Sуд.
Первой безопасной скоростью (uб1) автомобиля называют минимальную скорость, следуя с которой водитель может, своевременно применив экстренное торможение, остановить автомобиль у линии следования пешехода. Значение первой безопасной скорости получаем, приравняв удаление длине остановочного пути [см. формулу (3.17)]:
 (4.1)
(4.1)
Первая безопасная скорость зависит лишь от показателей, характеризующих водителя, автомобиль и дорогу. Параметры движения пешехода в выражение (4.1) не входят. Если автомобиль останавливается на расстоянии, равном удалению, то безопасность обеспечивается независимо от движения пешехода по проезжей части.
В экспертной практике формулу (4.1) иногда применяют для определения скорости, «с которой водитель обязан был вести автомобиль, чтобы избежать наезда па пешехода». Особенно часто эту формулу применяли и в то время, когда в Правилах дорожного движения имелась формулировка: «скорость, обеспечивающая безопасность движения».
Ошибочность подобной трактовки состоит в том, что при экспертизе ДТП удаление автомобиля не задается произвольно, как принято выше, а определяется расчетом, исходя из действий пешехода. Расчетное удаление зависит от того момента времени, в который пешеход начинает свое движение. Этот момент выбирает пешеход, и о нем водитель может только догадываться. Неопределенность действий пешехода часто усугубляется их нелогичностью, особенно разительной при опьянении пешехода или болезненном его состоянии.
Требуя от водителя, чтобы он вел автомобиль со скоростью uб1, забывают, что эта скорость мгновенная, действительная лишь для данного удаления Sуд и по мере приближения к пешеходу беспрерывно уменьшающаяся вследствие уменьшения этого расстояния. Фактически такое требование означает, что водитель, приближаясь к стоящему на краю проезжей части пешеходу, намерения которого ему неизвестны, обязан заблаговременно и беспрерывно уменьшать скорость своего автомобиля. Поскольку же при определении uб1 исходят из максимальной эффективности торможения, то рассматриваемые требования по существу сводятся к требованию тормозить до остановки при виде пешехода, находящегося вблизи полосы движения автомобиля.
Для объективного расследования ДТП и установления возможности его предотвращения необходимо оценить поведение всех участников происшествия. Технически неграмотно определять допустимую скорость автомобиля исходя из действий пешехода, являющегося инициатором создания опасной дорожной обстановки. Ответственность водителя за последствия наезда на пешехода может быть установлена лишь в том случае, когда водитель видел, что пешеход двигался, пренебрегая собственной безопасностью, но своевременно не принял мер к предотвращению наезда.
Второй безопасной скоростью автомобиля  называют минимальную скорость, следуя с которой автомобиль полностью проедет линию следования пешехода в момент, когда тот подойдет к его полосе движения.
называют минимальную скорость, следуя с которой автомобиль полностью проедет линию следования пешехода в момент, когда тот подойдет к его полосе движения.
Как видно на рис. 4.1, а, автомобиль, движущийся равномерно со второй безопасной скоростью, переместится за время t на расстояние:

где  — габаритная длина автомобиля.
— габаритная длина автомобиля.
Пешеход за это время пройдет расстояние  , равное ∆ y. Следовательно,
, равное ∆ y. Следовательно,  , откуда
, откуда
 (4.2)
(4.2)

|
Рис.4.1. Схемы к расчету второй (а) и третьей (б) безопасных скоростей автомобиля
В этом случае для сохранения безопасности должно быть выполнено условие 
 .
.
Значение второй безопасной скорости увеличивается с увеличением расстояния  и скорости пешеходов, а также с уменьшением бокового интервала ∆у. При небольших значениях ∆у, характерных для движения по узким улицам городов и населенных пунктов, скорость должна быть весьма большой. Поэтому такой способ обеспечения безопасности нежелателен, а при малых значениях ∆у и невозможен, так как расчетное значение может превысить не только установленные ограничения, но и максимально возможную скорость данного автомобиля.
и скорости пешеходов, а также с уменьшением бокового интервала ∆у. При небольших значениях ∆у, характерных для движения по узким улицам городов и населенных пунктов, скорость должна быть весьма большой. Поэтому такой способ обеспечения безопасности нежелателен, а при малых значениях ∆у и невозможен, так как расчетное значение может превысить не только установленные ограничения, но и максимально возможную скорость данного автомобиля.
Третьей безопасной скоростью автомобиля  называют максимальную скорость, двигаясь с которой, автомобиль достигнет линии следования пешехода к тому моменту, когда пешеход уже уйдет с его полосы движения (рис. 4.1, б). Для этого необходимо соблюдение равенства
называют максимальную скорость, двигаясь с которой, автомобиль достигнет линии следования пешехода к тому моменту, когда пешеход уже уйдет с его полосы движения (рис. 4.1, б). Для этого необходимо соблюдение равенства

где  — габаритная ширина автомобиля.
— габаритная ширина автомобиля.
Скорость

В этом случае условие безопасности: 
Вторая и третья безопасные скорости зависят от интервала ∆у (рис. 4.2). Область А характеризует скорость, двигаясь с которой, автомобиль проедет мимо пешехода раньше, чем тот достигнет опасной зоны. Область В характеризует значения скорости, двигаясь с которой, автомобиль пропустит пешехода раньше, чем сам достигнет его линии следования. Наконец, зона Б характеризует скорости, при которых наезд автомобиля на пешехода при равномерном движении неизбежен.
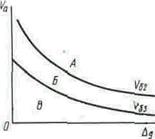
Рис. 4,2. Зависимость скоростей от бокового интервала.
Четвертой безопасной скоростью автомобиля  называют максимальную скорость, при которой водитель, своевременно применив экстренное торможение, успевает пропустить пешехода. Автомобиль при этом не останавливается у линии следования пешехода и пересекает ее с некоторой скоростью
называют максимальную скорость, при которой водитель, своевременно применив экстренное торможение, успевает пропустить пешехода. Автомобиль при этом не останавливается у линии следования пешехода и пересекает ее с некоторой скоростью  .
.
Время движения автомобиля Т в интервале изменения скорости от до равно времени перемещения пешехода на расстояние (∆у + Ва):

Скорость, с которой заторможенный автомобиль достигает линий следования пешехода,  . Путь автомобиля в том же диапазоне изменения скорости
. Путь автомобиля в том же диапазоне изменения скорости  . Подставив в эту формулу значение и» и решая уравнение относительно , получаем выражение для четвертой безопасной скорости:
. Подставив в эту формулу значение и» и решая уравнение относительно , получаем выражение для четвертой безопасной скорости:

При  четвертая безопасная скорость равна третьей, а при = 0 - первой безопасной скорости. Чем менее интенсивно тормозит водитель (т. е. чем меньше j), тем меньше должна быть начальная скорость автомобиля, чтобы пропустить пешехода. Когда замедление отсутствует, четвертая безопасная скорость становится равной скорости .
четвертая безопасная скорость равна третьей, а при = 0 - первой безопасной скорости. Чем менее интенсивно тормозит водитель (т. е. чем меньше j), тем меньше должна быть начальная скорость автомобиля, чтобы пропустить пешехода. Когда замедление отсутствует, четвертая безопасная скорость становится равной скорости .
Пятой безопасной скоростью автомобиля  называют такую скорость, следуя с которой, водитель, даже применив экстренное торможение в момент возникновения опасности, успевает проехать мимо пешехода. Эту скорость можно определить, используя формулу (3.20) и выражение
называют такую скорость, следуя с которой, водитель, даже применив экстренное торможение в момент возникновения опасности, успевает проехать мимо пешехода. Эту скорость можно определить, используя формулу (3.20) и выражение

Исключая из этих выражений конечную скорость аналогично тому, как это было сделано выше при определении , получаем

где  — время движения пешехода.
— время движения пешехода.
При использовании этой формулы необходимо иметь в виду, что время , подставляемое в формулу (4.4),
значительно меньше, чем при расчете скорости и^, так как в первом случае пешеход преодолевает лишь боковой интервал Лу, отделяющий его от опасной зоны, во втором же случае он должен пройти расстоя- > ние Лу+ба. Время ^==Лу/ип.
Численное значение пятой безопасной скорости обычно велико и часто близко к значению максимально возможной скорости автомобиля. При ^*< Т кривая Уб5 сливается с кривой второй безопасной скорости, а при ин==0 переходит в прямую, параллельную оси абсцисс.
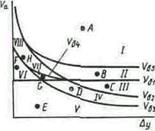
Рис. 4.3. Сводный график безопасных скоростей автомобиля
Чтобы сравнить между собой различные способы сохранения безопасности при прямолинейном движении автомобиля, нанесем кривые и==г(Лу) для всех безопасных скоростей на один график (рис. 4.3).
Все поле графика можно разделить на восемь зон (/—У///). Для каждой цз зон характерны свои способы обеспечения безопасности и положения автомобиля после остановки. Так, при сочетаниях интервала Лу и скорости, характеризуемых зонами /—///, водитель проедет мимо пешехода, не снижая скорости. В первой зоне (точка А) и третьей зоне (точка С) можно также применить экстренное торможение. В первом случае заторможенный автомобиль, проехав мимо пешехода, остановится за линией его следования, а во втором — до этой линии. В зоне // (точка В) экстренное торможение приведет к наезду на пешехода. В зонах IV и VII, напротив, единственным средством обеспечения безопасности является своевременное экстренное торможение (точки О и С). При значениях интервала и скорости, охватываемых этими зонами, равномерное движение автомобиля не предотвращает наезда на пешехода. Водитель не может ни пропустить пешехода (иа> У&з), ни проехать мимо него (иа<Уб2). В зонах V (точка Е) и VI (точка Р) пешеход успевает перейти полосу движения автомобиля при Уа=соп§(. В случае своевременного экстренного торможения автомобиль останавливается либо после пересечения линии следования пешехода (зона VI}, либо до нее (зона V). Наконец, зона VIII (точка Н) характе-
ризует сочетание таких условий движения, при которых водитель не имеет технической возможности предотвратить ДТП, не изменяя направления движения автомобиля.
Среди рассмотренных зон наибольший интерес представляет зона //. При интервале и скорости, характерных для этой зоны, экстренное торможение автомобиля в противовес установившемуся мнению не только не обеспечит требуемой безопасности, но, напротив, приводит к неизбежному наезду на пешехода. В этом случае водитель, выполняющий указания Правил дорожного движения, которые предписывают снижение скорости при появлении препятствия, не ликвидирует, а усугубляет опасную дорожную обстановку. Снижение скорости, вызываемое интенсивным торможением, способствует перерастанию опасной дорожной обстановки в аварийную, и наезд на пешехода становится неотвратимым.
Приведенные графики и расчеты характеризуют лишь предельные технические возможности автомобиля при нормативном значении всех параметров. Соображения, аналогичные приведенным выше, не могут и не должны служить основанием для обвинения водителя в пренебрежении требованиями безопасности. Определение ответственности участников ДТП выходит за рамки компетенции автотехнического эксперта и является предметом деятельности судебных органов. Вместе с тем график наглядно показывает, что водитель во многих случаях может обеспечить безопасность и предотвратить наезд на пешехода не только путем экстренного торможения автомобиля. Не менее вероятно также сочетание условий движения, при котором безопасность можно обеспечить, сохраняя неизменной скорость автомобиля. В некоторых же случаях единственным способом является увеличение скорости.
Рассматривая безопасные скорости автомобиля и действия водителя, следует также указать, что, как правило, у пешехода гораздо больше шансов увидеть приближающийся автомобиль, чем у водителя заметить пешехода, так как параметры внешней информативности автомобиля (размеры, шумность, сигнализация) в несколько раз выше, чем у человека. Кроме того, пешеход может значительно легче изменить направление и скорость движения и оградить тем самым себя от опасности, чем любое транспортное средство. Однако приходится считаться с непреложным фактом: если произошел наезд транспортного средства на пешехода, то независимо от действий и состояния пешехода в положении подозреваемого (а затем и обвиняемого) прежде всего оказывается водитель. Причина такого подхода к оценке ДТП в известной мере объясняется установившимся мнением, согласно которому водитель управляет «источником повышенной опасности», т. е. таким предметом, который, будучи приведен в движение, проявляет свойства, исключающие возможность остановить предмет и прервать его движение. Такое мнение об автомобиле во многом напоминает печально известный английский' закон XIX в., согласно которому перед поездом должен был бежать человек с красным флагом и криками предупреждать население о «приближающейся опасности».
Согласно действующему законодательству имеется возможность привлекать к судебной ответственности пешехода, действия которого повлекли за собой ДТП, однако на практике эта возможность реализуется крайне редко.
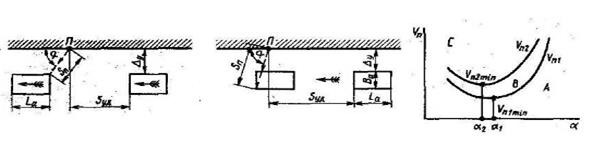
Определим условия, при которых может избежать наезда пешеход, движущийся прямолинейно с постоянной скоростью под углом α к направлению движения автомобиля (рис. 4.4). Движение автомобиля также считаем прямолинейным и равномерным. Очевидно, пешеход может обеспечить собственную безопасность двумя способами:
либо двигаться сравнительно медленно, чтобы автомобиль успел проехать мимо него, не задев, либо, напротив, двигаться максимально быстро, чтобы успеть пройти перед автомобилем.
Первой безопасной скоростью пешехода  назовем максимальную скорость, следуя с которой, пешеход подойдет к полосе движения автомобиля к тому моменту, когда автомобиль пересечет его линию следования.
назовем максимальную скорость, следуя с которой, пешеход подойдет к полосе движения автомобиля к тому моменту, когда автомобиль пересечет его линию следования.
Согласно рис. 4.4  , откуда первая безопасная скорость пешехода
, откуда первая безопасная скорость пешехода
 (4.5)
(4.5)
При α = 0 скорость =  . Условие сохранения безопасности:
. Условие сохранения безопасности:  . Первая безопасная скорость пешехода зависит от угла α, как показано на рис. 4.5. Найдем угол α 1, при котором скорость минимальна. Продифференцировав
. Первая безопасная скорость пешехода зависит от угла α, как показано на рис. 4.5. Найдем угол α 1, при котором скорость минимальна. Продифференцировав
формулу (4.5) по а и приравнивая производную нулю, получаем
 . (4.6)
. (4.6)
Из выражений (4.5) и (4.6) имеем

Второй безопасной скоростью пешехода  назовем такую минимальную скорость, двигаясь с которой, он успеет покинуть полосу движения автомобиля к тому моменту, когда последний приблизится к его линии следования.
назовем такую минимальную скорость, двигаясь с которой, он успеет покинуть полосу движения автомобиля к тому моменту, когда последний приблизится к его линии следования.
Согласно рис. 4.6.  откуда вторая безопасная скорость пешехода
откуда вторая безопасная скорость пешехода
(4.4) (4.6) (4.5)
Рис. 4.4. Схема к расчету первой безопасной скорости пешехода
Рис. 4.5. Зависимость безопасных скоростей пешехода от угла а
Рис. 4.6. Схема к расчету второй безопасной скорости пешехода
При α = 0 скорость  .
.
Вторая безопасная скорость также зависит от направления движения пешехода (см. рис. 4.5). Она минимальна при угле α 2 , значение которого находим из выражения  .
.
Минимальное значение второй безопасной скорости

Условие безопасности: пешеход.должен двигаться со скоростью, не меньшей, чем вторая безопасная скорость:  .
.
Таким образом, чтобы избежать наезда и обеспечить собственную безопасность, пешеход должен двигаться либо со скоростью, не превышающей (зона А), либо со скоростью, не меньшей, чем (зона С). При движении со скоростями, характерными для зоны B, наезд неизбежен. Если пешеход намерен пропустить автомобиль, то наиболее опасным будет его движение под углом α 1, так как допустимая скорость при этом минимальна. Если же он хочет перейти дорогу перед автомобилем, то наиболее целесообразным будет его движение под углом α 2, так как при любом другом направлении движения он должен будет идти быстрее, чтобы перейти дорогу.
Контрольные вопросы
Дата добавления: 2015-10-16; просмотров: 291 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| ПАРАМЕТРЫ ДВИЖЕНИЯ ПЕШЕХОДА | | | КЛАССИФИКАЦИЯ НАЕЗДОВ НА ПЕШЕХОДА |