Читайте также:
|
Примеры условных графических обозначений обмоток ВТ приведены на рис.1.4.
|
|
|
|
На рис.1.4,а приведено полное изображение обмоток контактного ВТ, имеющего двухфазные обмотки статора и ротора. С целью уменьшения количества контактных колец два вывода роторной обмотки объединяются. При упрощенном обозначении данного ВТ ротор представляется в виде окружности с соответствующими выводами – рис.1.4,б.
Бесконтактные ВТ часто имеют одну роторную обмотку машинной части, которая соединяется с роторной обмоткой переходного кольцевого трансформатора – рис.1.4,в. Некоторые бесконтактные ВТ с ПКТ имеют две роторные обмотки машинной части, одна из которых с целью так называемого первичного симметрирования замыкается накоротко – рис.1.4,г.
В зависимости от схемы включения обмоток ВТ и получаемой при этом функции параметров выходных напряжений от угла поворота ротора, в частности, различают: синусный ВТ, синусно-косинусный ВТ, линейный ВТ, фазовращатель. Схема синусного ВТ без симметрирования приведена на рис.1.5,а.
|
|
Рис.1.5. Схема синусного ВТ без симметрирования (а) и
векторные диаграммы магнитных потоков (б)
 , изменяющимся в соответствии с (1.3). Ток Iв данной обмотки создает пульсирующий поток возбуждения Фd, направленный по оси данной обмотки (продольной оси d). Если пренебречь падением напряжения на внутреннем сопротивлении обмоток ОВ, напряжение уравновешивается ЭДС
, изменяющимся в соответствии с (1.3). Ток Iв данной обмотки создает пульсирующий поток возбуждения Фd, направленный по оси данной обмотки (продольной оси d). Если пренебречь падением напряжения на внутреннем сопротивлении обмоток ОВ, напряжение уравновешивается ЭДС  , наводимой потоком Фd,
, наводимой потоком Фd,
 (1.10)
(1.10)
где wэф – эффективное число витков обмотки статора.
Исходя из (1.3), (1.10), максимальное значение пульсирующего магнитного потока по оси d
 (1.11)
(1.11)
Таким образом, величина потока Фd определяется приложенным напряжением.
Поток Фd наводит в синусной обмотке ротора SО ЭДС еS, величина которой является синусоидальной функцией угла поворота α. При холостом ходе, когда сопротивление нагрузки zHS = ∞, напряжение нагрузки  . Для ВТ с одной парой полюсов
. Для ВТ с одной парой полюсов
 , (1.12)
, (1.12)
где  - коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора).
- коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора).
При наличии нагрузки zHS протекает ток iS, который создает поток ФS, направленный по оси обмотки SО. Потоки, создаваемые токами iВ, iS, можно изобразить в виде векторов  и
и  , направленных по осям соответствующих обмоток, - рис.1.5,б.
, направленных по осям соответствующих обмоток, - рис.1.5,б.
можно представить в виде суммы продольной  и поперечной
и поперечной  составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки
составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки  от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.
от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.
Для уменьшения погрешностей применяют симметрирование ВТ – первичное и вторичное. При вторичном симметрировании (рис.1.6) обе обмотки ротора – синусная SО и косинусная СО нагружаются на одинаковые сопротивления
 . (1.13)
. (1.13)
|
|
Рис. 1.6. Схема ВТ со вторичным симметрированием (а) и векторные диаграммы магнитных потоков (б)
Токи iS и iС создают потоки и  , поперечные составляющие которых и
, поперечные составляющие которых и  взаимно компенсируются, - рис.1.6,б.
взаимно компенсируются, - рис.1.6,б.
Вращающийся трансформатор со вторичным симметрированием фактически является синусно-косинусным.
Недостатком вторичного симметрирования является необходимость соблюдения условия (1.13).
наводит в КО ЭДС, под действием которой протекает ток iк, создающий поток  . Данный поток компенсирует (рис.1.7,б), что уменьшает погрешность.
. Данный поток компенсирует (рис.1.7,б), что уменьшает погрешность.
|
|
Рис. 1.7. Синусный ВТ с первичным симметрированием
Недостатком первичного симметрирования является зависимость входного сопротивления ВТ от угла α. Это приводит к некоторой погрешности из-за изменения падения напряжения в контуре обмотки возбуждения.
где kТ – коэффициент трансформации; U вых, UВ – действующие значения выходного и питающего напряжений. При kТ = 0,52÷0,56 отклонение зависимости Uвых = f(α) от линейной не более 1 % в | 
|
диапазоне изменения α от -55˚ до +55˚.
Схема фазовращателя с двухфазным питанием приведена на рис.1.9,а.
Рис.1.9. Схемы ВТ в режиме фазовращателя
К одной из обмоток ротора подключается нагрузка zН. Обмотки статора питаются напряжениями
 (1.15)
(1.15)
Создаваемое при этом вращающееся магнитное поле наводит в выходной обмотке ЭДС, фаза которой зависит от угла поворота ротора α. Для напряжения нагрузки Uвых можно записать
 (1.16)
(1.16)
где Um 1, ψ – константы; р – число пар полюсов ВТ.
Схема фазовращателя с однофазным питанием приведена на рис.1.9,б. К роторным обмоткам присоединяются нагрузка zН, емкость С1 и резистор R1. Для получения режима фазовращателя необходимо соблюдать условия

 (1.17)
(1.17)
где  и
и  - выходные сопротивления ВТ; ω – частота питания.
- выходные сопротивления ВТ; ω – частота питания.
Частота питания ВТ обычно лежит в окрестности
2 кГц. При этом > . Для соблюдения условия (1.17) последовательно с каждой обмоткой ротора включают добавочный резистор.
На основе ВТ также строятся системы дистанционной передачи угла (СДПУ), подобные трансформаторной СДПУ на сельсинах. Возможный вариант такой системы приведен на рис. 1.10.
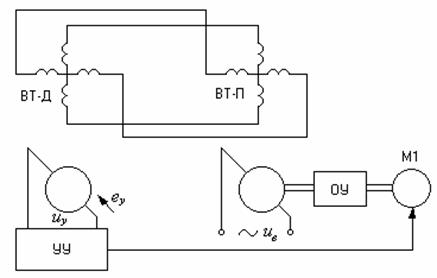
Рис. 1.10. Вариант СДПУ с использованием ВТ
Напряжение роторной обмотки ВТ-Д uу, поступающее в устройство управления УУ, является сигналом задания скорости двигателя ОУ. Если a ¹ 0, то и ЭДС uу ¹ 0 и М1 вращает вал ОУ до устранения рассогласования a. При повороте ротора ВТ-Д на заданный угол на тот же угол поворачивается вал, с которым связан ротор ВТ-П.
Рассматриваемая система используется, например, в станках с ЧПУ. При управлении координатой станка от устройства ЧПУ используется лишь ВТ-П. Выходные напряжения статорной обмотки ВТ-П служат для получения сигнала обратной связи по положению. При «ручном» управлении система переключается в режим СДПУ (рис.1.10) и координата станка управляется за счет поворота ротора ВТ-П.
Вращающиеся трансформаторы являются более точными датчиками, чем сельсины.
2. ЛАБОРАТОРНАЯ РАБОТА
«ИССЛЕДОВАНИЕ СЕЛЬСИНОВ»
Дата добавления: 2015-09-05; просмотров: 234 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Схемы включения сельсинов | | | Синхронной связи |
 (1.14)
(1.14)