Читайте также:
|
20. Статические характеристики асинхронного двигателя в двигательном и тормозных режимах работы.
Схема включения асинхронного двигателя зависит от конструкции ротора.
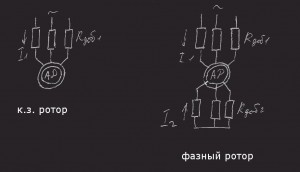
Для получения математических выражений электромеханической и механической характеристик асинхронного двигателя используется Г-образная схема замещения для одной фазы электродвигателя.

I2’ = Uф / √[(r1 + r2’/s)2 + xк2] – электромеханическая характеристика асинхронного двигателя.
xk = x1 + x2’
В отличие от ДПТ, у которых электромеханическая характеристика является зависимостью скорости от тока якоря, у асинхронных двигателей электромеханическая характеристика является зависимостью I2’(s).
ω = ω0(1 – s)

Рассмотрим характерные точки электромеханической характеристики:
s=0; ω=ω0=2πf/p; I2’=0;
s=1; ω=0; I2’=Iкз’=Uф/√[(r1 + r2’)2 + xк2]
s=s1=r2’/r1; ω1=ω0(1 – s1)
s1 – скольжение, при котором I2’ достигает максимума.
I2m’ = Uф / xк
Точка максимального тока ротора всегда лежит в области отрицательных скольжений.
Если s→∞; ω→∞; I2’→[Uф / √(r12 + xк2)]=I2∞’
I2∞’ является асимптотой, к которой стремится ток ротора в областях скольжений, близких к бесконечности.
Электромеханическая характеристика асинхронного двигателя редко используется в электроприводах с асинхронными двигателями для изучения их работы. Обычно при изучении регулировочных свойств электродвигателей используется механическая характеристика.
У асинхронного двигателя можно осуществить следующие виды торможения: торможение противовключением, генераторное торможение, динамическое торможение, торможение с самовозбуждением.
Дата добавления: 2015-09-05; просмотров: 171 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Где - электромеханическая постоянная времени. | | | Динамическое торможение |