Читайте также:
|
Структурная схема двухконтурной системы управления ДПТ НВ с ПИ-регуляторами скорости и тока приведена на рисунке 39.
Рис. 39. Структурная схема двухконтурной системы управления ДПТ НВ с ПИ-регуляторами скорости и тока приведена
САУ ДПТ с ПИ-регулятором скорости имеет пять переменных состояния (анализируя схему справа налево): скорость вала двигателя, ток якоря двигателя, выходное напряжение тиристорного преобразователя, представленного апериодическим звеном 1-го порядка, интегральная составляющая выходного напряжения ПИ-регулятора тока, а также интегральная составляющая выходного напряжения ПИ-регулятора скорости.
Соответственно, математическое описание электромеханической системы можно представить в виде системы из пяти дифференциальных уравнений первого порядка. Рассмотрим составление этих уравнений, начиная с выходной координаты электропривода и двигаясь последовательно к началу системы.
Динамику изменения скорости вала двигателя описывает дифференциальное уравнение движения:
Уравнение равновесия напряжений для якорной цепи двигателя:

Для составления уравнения для преобразователя запишем сначала его передаточную функцию:

Операторное уравнение, описывающее апериодическое звено 1-го порядка:

Дифференциальное уравнение для тиристорного преобразователя:

Входное напряжение преобразователя распишем через переменные и параметры системы, учитывая обратные связи по скорости и току, а также передаточные функции регуляторов:


где  – пропорциональная и интегральная составляющие выходного напряжения регулятора тока соответственно.
– пропорциональная и интегральная составляющие выходного напряжения регулятора тока соответственно.
Для составления дифференциального уравнения для интегральной составляющей регулятора тока запишем сначала передаточную функцию регулятора в виде суммы составляющих:

Уравнение для интегральной части регулятора тока выведем из ее передаточной функции:



Аналогично составим уравнение для интегральной части регулятора скорости:

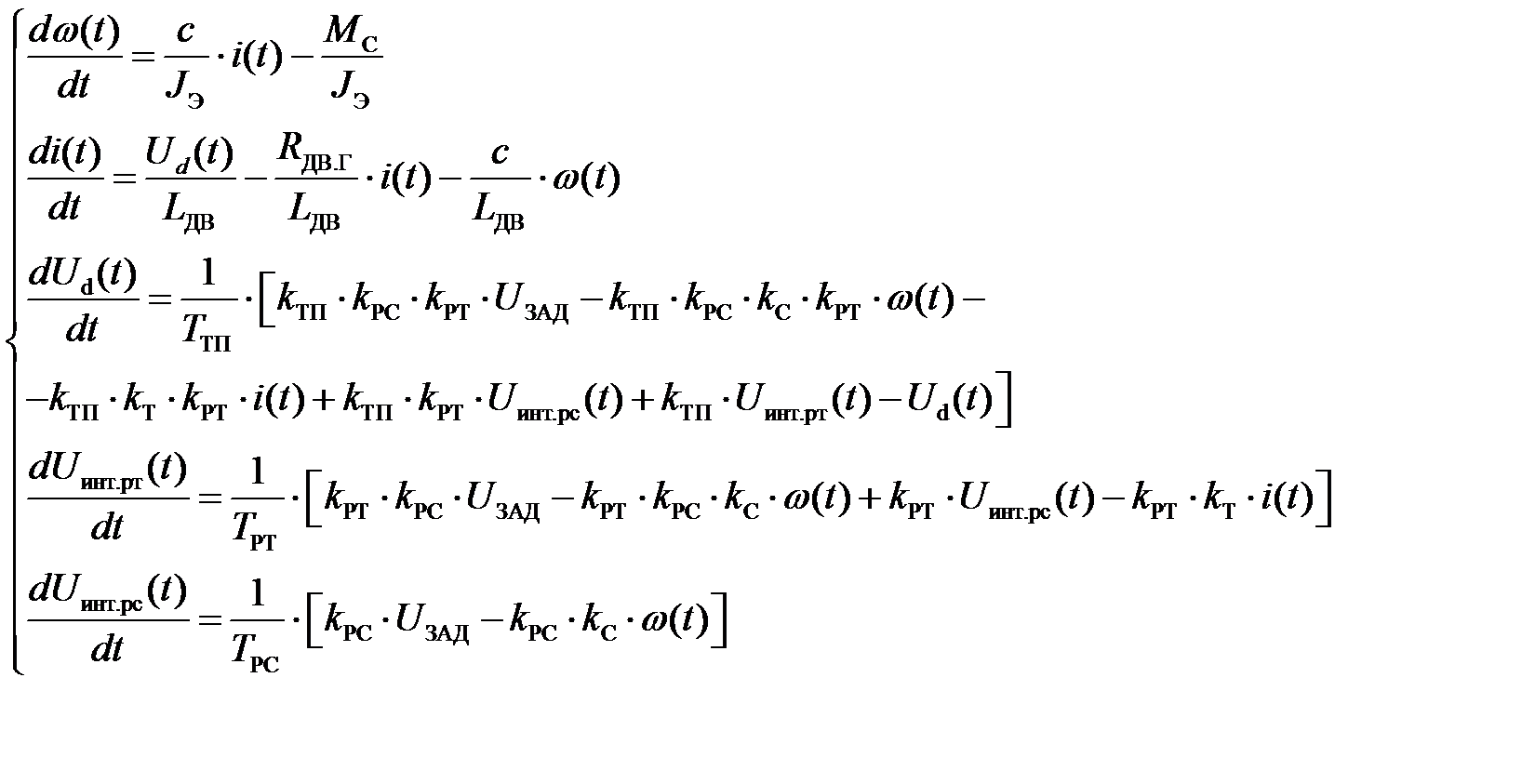
Сведем дифференциальные уравнения в систему:

Представим систему в нормальной форме Коши:
Приведем решение СДУ в программной среде MathCAD операторным методом.
На рис. 40 изображена имитационная модель САУ ДПТ с ПИ-регуляторами скорости и тока.
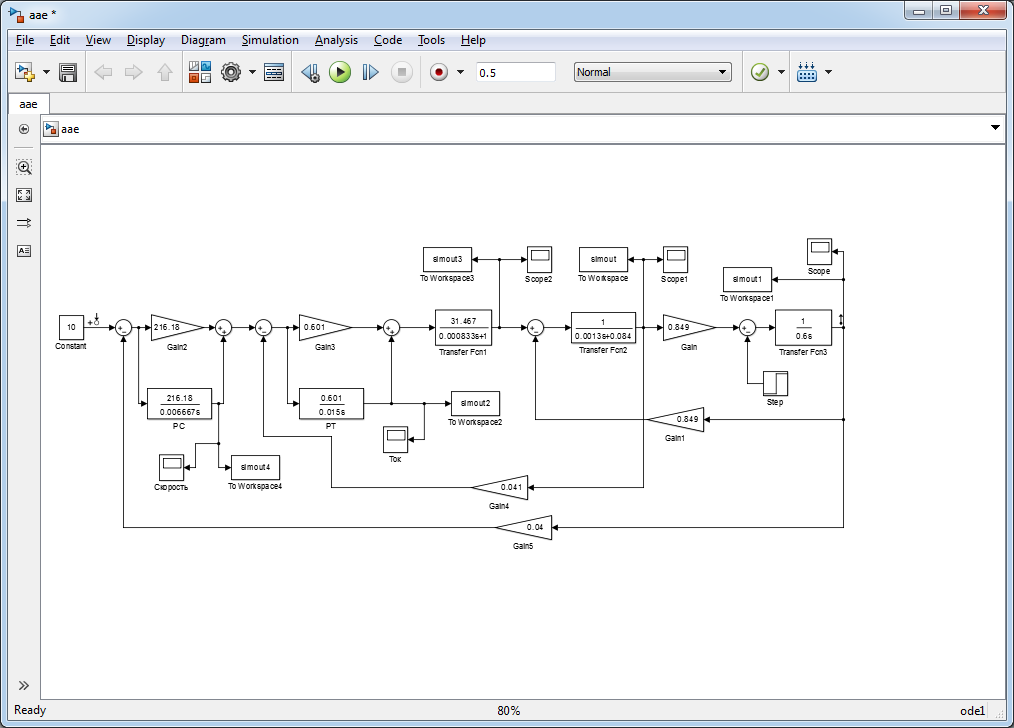
Рис. 40. Имитационная модель САУ ДПТ с ПИ-регуляторами скорости и тока
На рис. 41 изображена корневая плоскость, полученная в MATLAB.
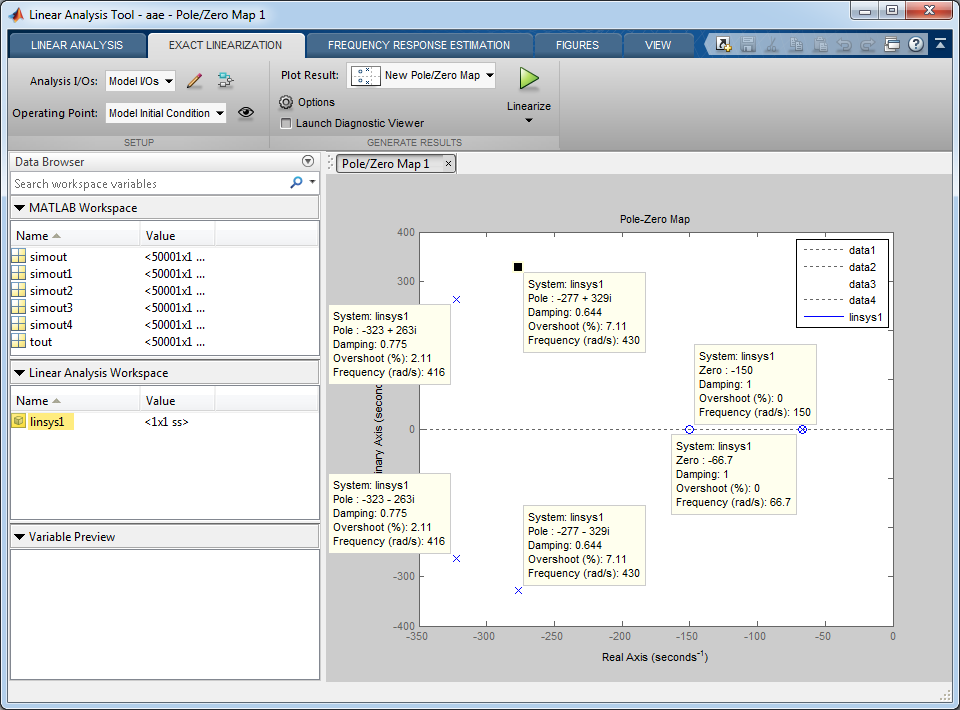
Рис. 41. Корневая плоскость
На рис. 42-46 изображены переходные процессы, полученные в MATLAB.
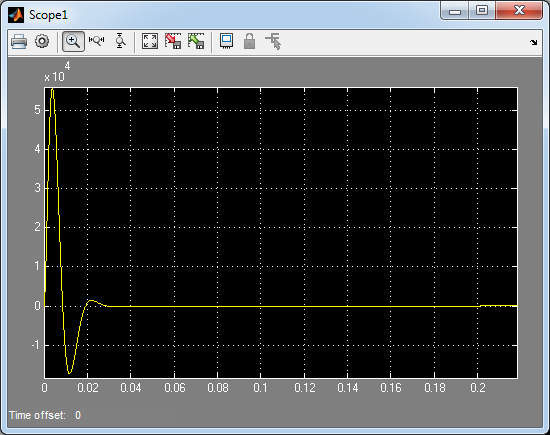
Рис. 42. Переходный процесс тока
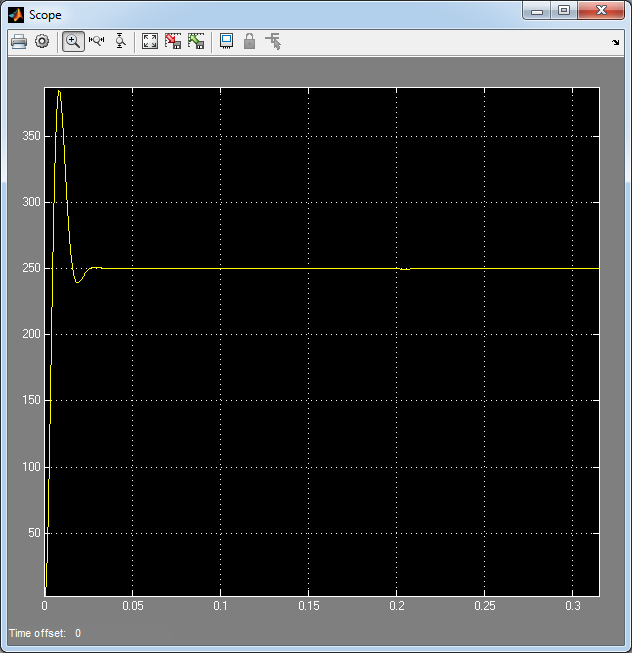
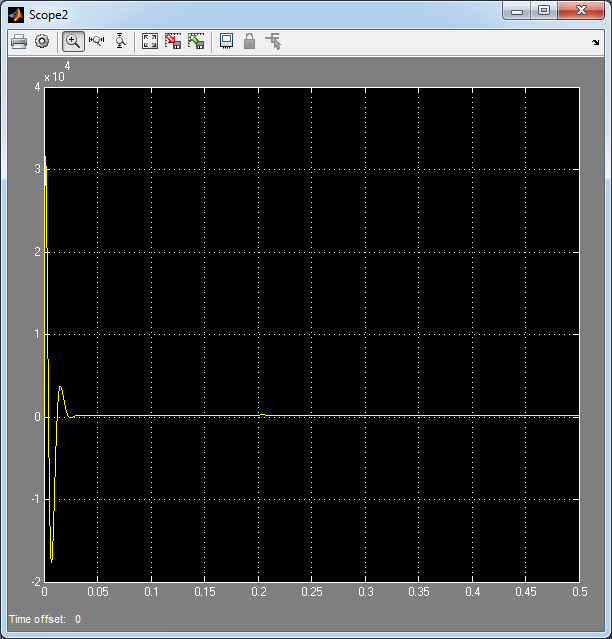 Рис. 43. Переходный процесс скорости
Рис. 43. Переходный процесс скорости
Рис. 44. Переходные процессы напряжений тиристорного преобразователя
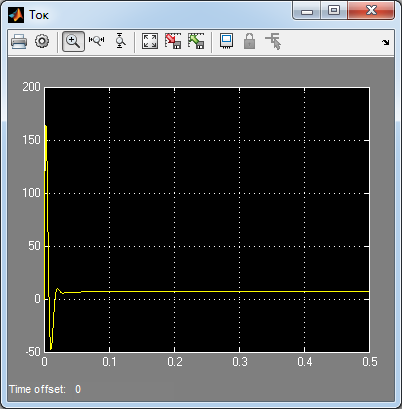
Рис. 45. Переходный процесс напряжения интегральной части ПИ-регулятора тока
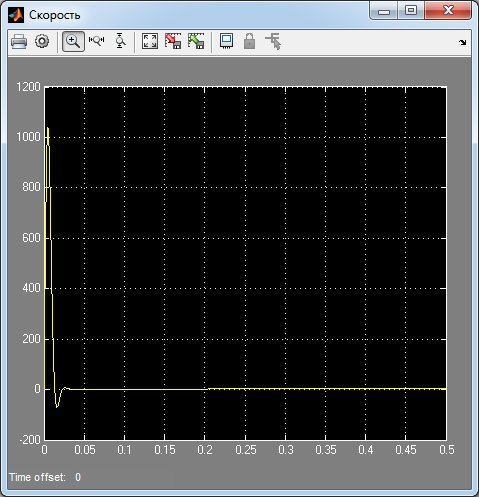
Рис. 46. Переходный процесс напряжения интегральной части
ПИ-регулятора скорости
Присваиваем параметры:

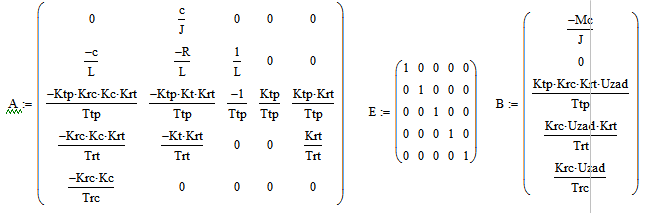
Матрицы параметров:
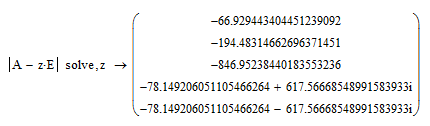
Находим собственные числа матрицы А:
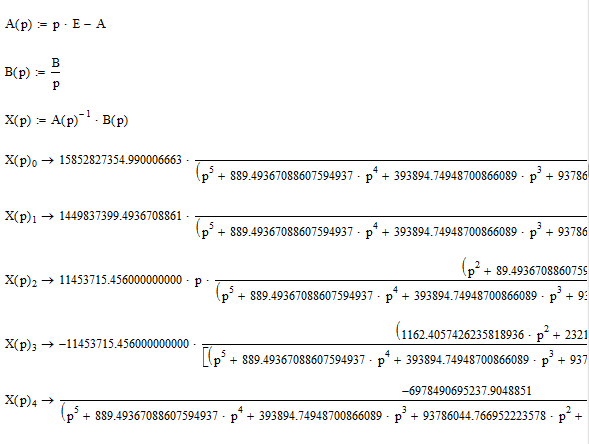
Решение системы уравнений операторным методом:

На рис. 47-51 изображены графики переходных процессов, полученных в Matchad для скорости вала и тока якоря ДПТ, напряжений тиристорного преобразователя и интегральной части ПИ-регулятора тока, напряжения интегральной части ПИ-регулятора скорости.

Рис. 47. Переходный процесс для скорости
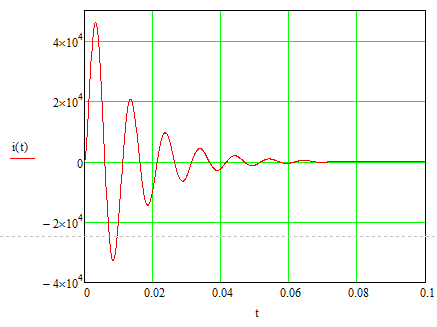
Рис. 48. Переходный процесс для тока

Рис. 49. Переходный процесс напряжений тиристорного преобразователя

Рис. 50. Переходный процесс интегральной части ПИ-регулятора тока
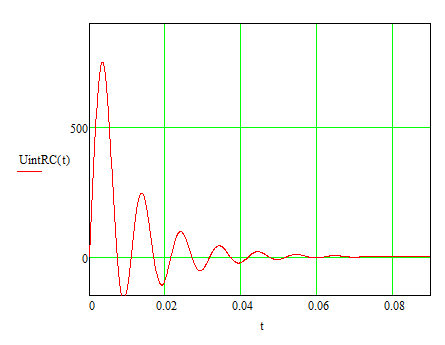
Рис. 51. Переходный процесс напряжения интегральной части
ПИ-регулятора скорости
Определим методом дихотомии время достижения максимума скорости электропривода, а также значение перерегулирования, и сравним с результатами в MATLAB Simulink.
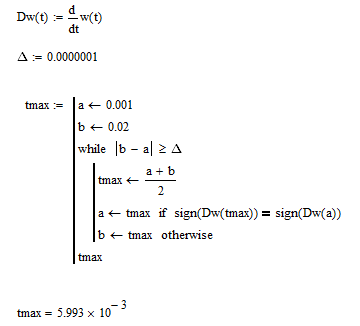
Перерегулирование:
Дата добавления: 2015-10-29; просмотров: 80 | Нарушение авторских прав
| <== предыдущая страница | | | следующая страница ==> |
| Часть 2. Математическое моделирование замкнутой САУ ДПТ в программной среде MathCAD | | | Часть 3.2. Система шестого порядка |